Uke 5 16.09-20.09
Felles
Maskin
Anders:
Den grove modellen av banen er denne uken nå modellert. Dette vil gjøre videre design av 3D modellerte deler til prosjektet lettere.
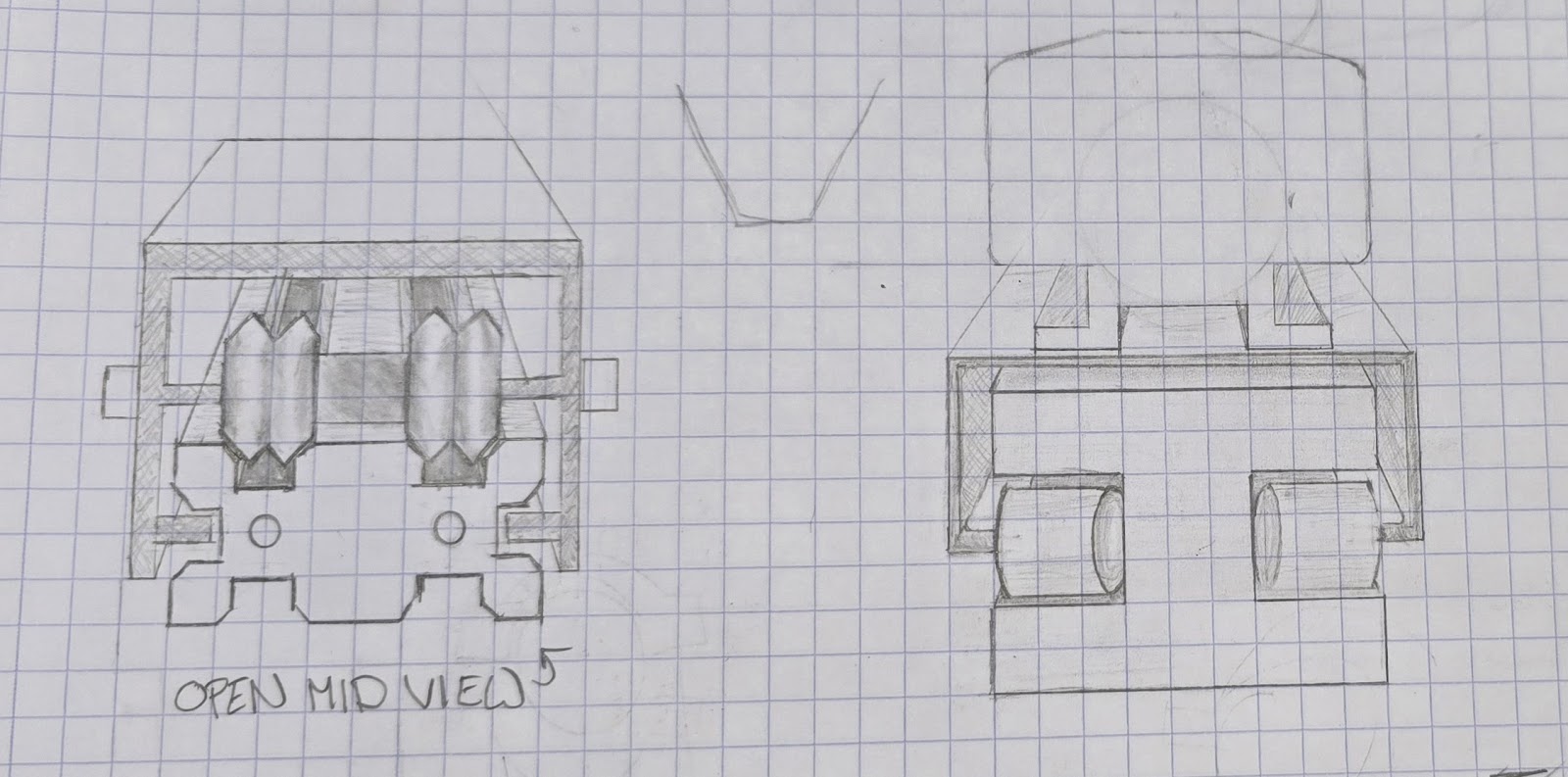
Tralla den roterende motoren er også redesignet og skisset opp klar til 3D modellering.
I tillegg til dette er det undersøkt ønsket materiale for delene vi skal produsere, foreløpig blir dette PLA plast til 3D printing, enkle bolter for oppheng til hjul aluminium for enkle dreide deler.
Andrea:
I utviklingen av systemet forandrer eventuelle løsningene seg hele tiden. Det går mye tid til å finne ut av hva maskin delen av gruppen må tilrettelegge og løse for at data og elektro skal ha det de trenger for å løse oppgaven vår.
Denne uken har vi funnet en eventuell løsning med kamera for tracking montert under bordet. Til dette må bunnen av bordet da byttes ut til noe gjennomsiktig. Vi har demontert bordet og skaffet oss akryl plate som skal kuttes til.
Etter å ha pratet med Richard om mulige løsninger har vi også skaffet oss skinner vi kan bruke til løping av motorene. Som gjør at løsningen for eventuell struktur som holder den roterende motoren måtte redesinges.
Data
Erik: Sett nærmere på kabler for kobling mellom Rasperry Pi 5 og kameramodulen.
Elektro:
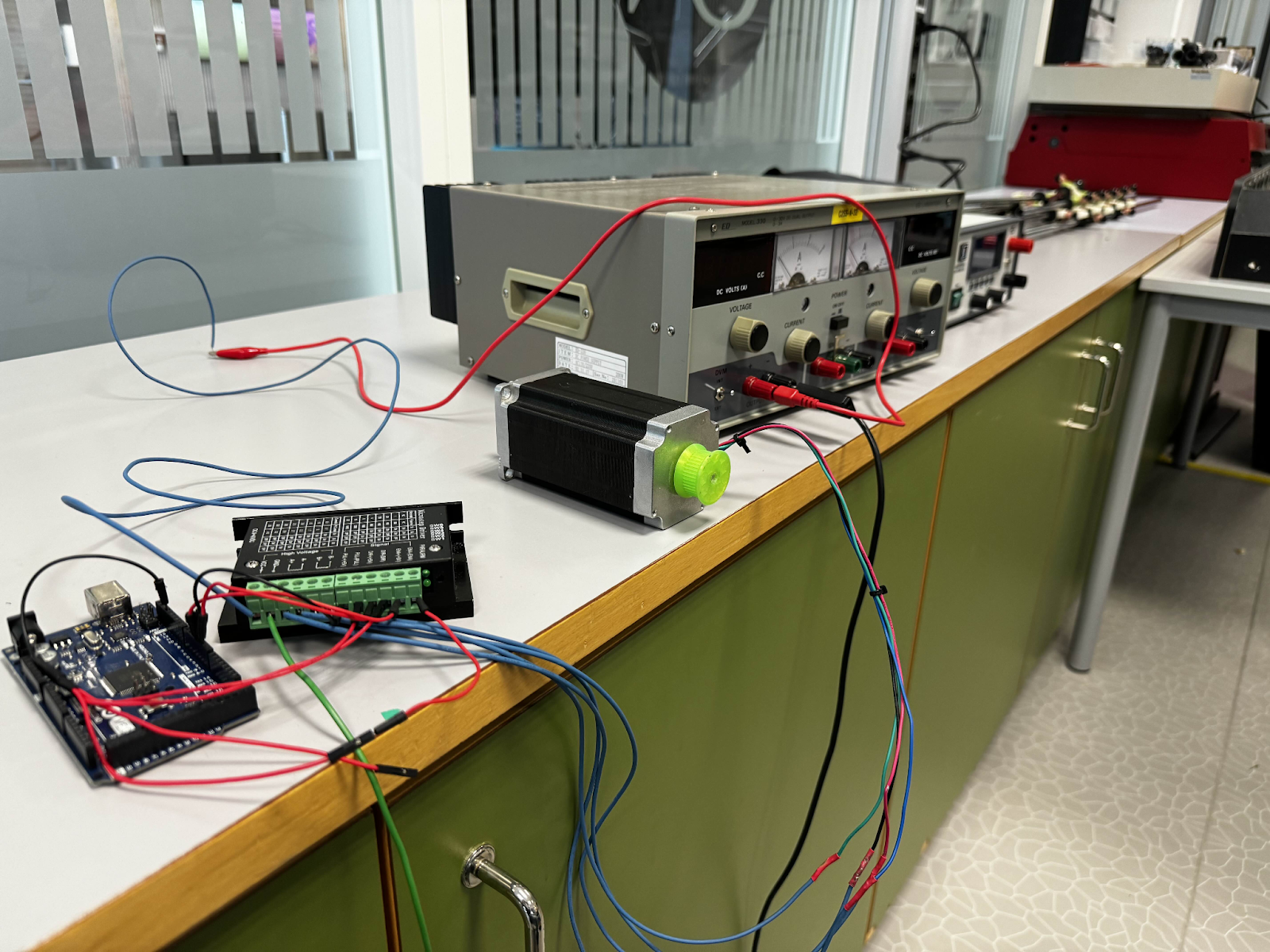
Kristian og Dag-Ove:
Denne uken har vi samarbeidet om å koble opp den ene motoren med motor driveren for å se om vi kan styre den med enkel arduino kode. Har hatt litt problemer med oppsettet av DIP pinnene til motor driveren. Først så vi at motoren prøve å spinne, men det virket som om den vibrerte på stedet. Det viste seg at motoren var koblet feil inn til driveren. Dette fant vi ut av ved å ta to av ledningene fra motoren mot hverandre og prøve å vri på den. Hvis det var veldig tungt å vri på den vet man at disse to ledningene skal kobles på A+ og A- på brettet. Etter dette ble fikset spinner motoren fritt ved hjelp av Arduino kode.