Felles Innlegg:
Spider Manufacturers (Maskin):
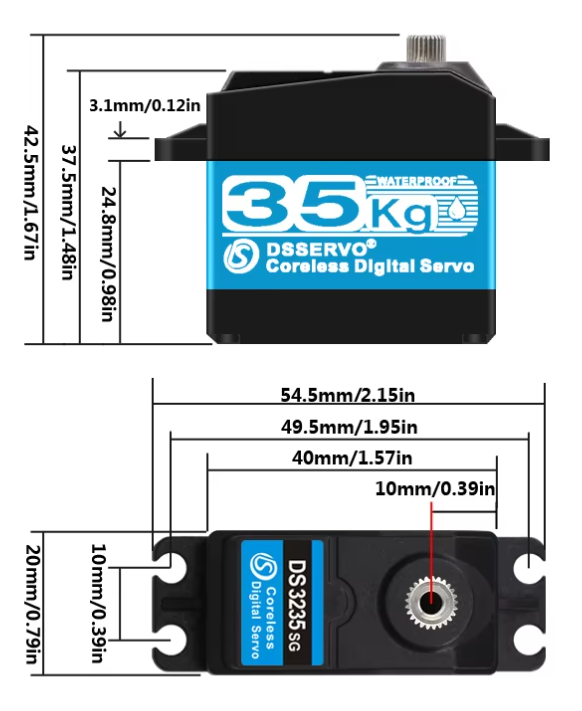
Spider Manufacturers har denne uken fokusert på å utvikle den tredje testriggen. De nye servomotorene som skal testes er av typen DS3235 Pro. Her er målene på DS3235 Pro:
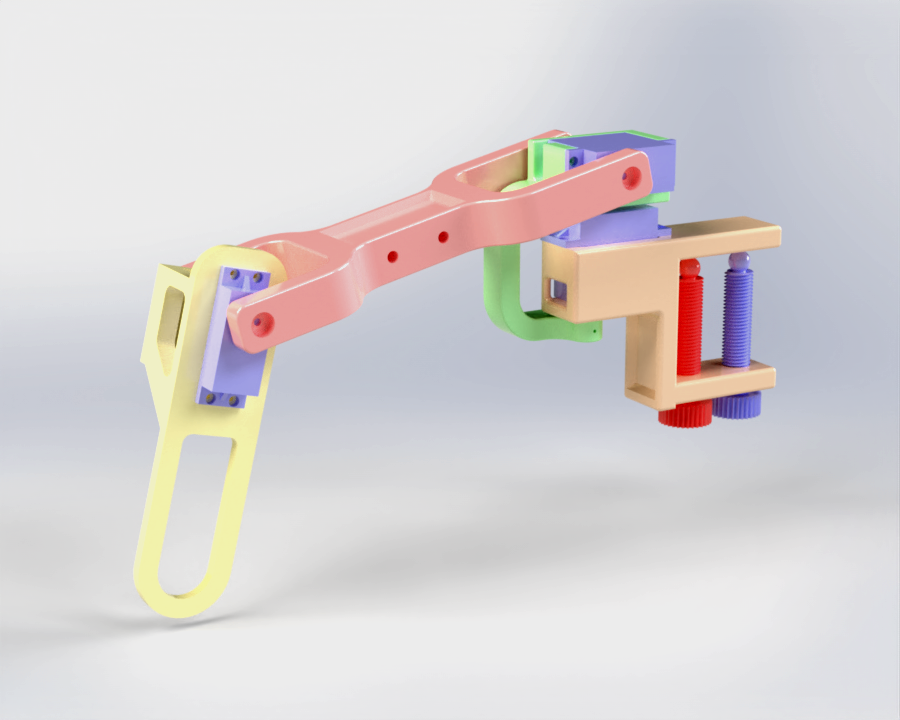
Oppgavene har blitt fordelt på medlemmene av Spider Manufacturers, men vi måtte samarbeide aktivt slik at de ulike komponentene passet sammen. Her er bilde av den tredje testriggen:
Videre har Spider Manufacturers planlagt å gjøre mer research mot det som vil bli kroppen av robot edderkoppen vår. Her må vi ta hensyn til følgende:
- Vekt
- Komponenter slik som kretskort, batteripakke og servoer
- Struktur
- Sammenstilling med bein
Creepy Coders (Data):
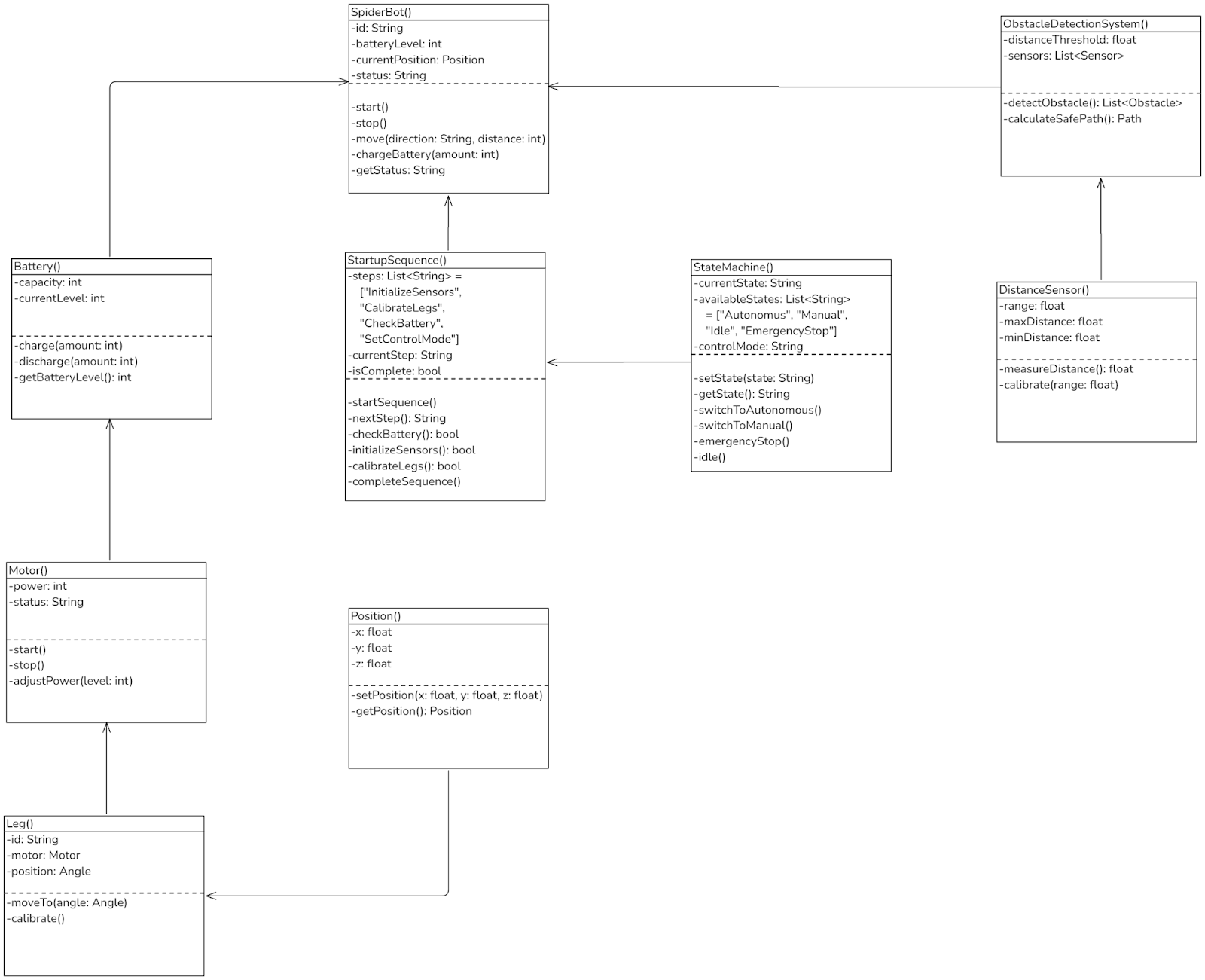
Denne uken så begynner UML å bli ferdigstilt (takk Bjørn Ole) og vi har sett litt på mulighetene ved å simulere Solidworks modellene som Spider Manufacturers har laget. I tillegg så har vi nå muligens funnet servoer som vi vil kunne bruke uten at de har “stutter”. De har blitt bestilt og 6 av dem forventes å komme i løpet av uken som kommer hvor vi så kan endelig prøve å mappe koden vi skal ha mot det fysiske.
Individuelle Innlegg:
Vinay:
Denne uken har jeg 3D-modellert ulike komponenter til testriggen, slik at datastudentene kan teste ut de nye servomotorene. Mer spesifisert har jeg 3D-modellert det ytterste leddet, hvor jeg måtte ta hensyn til dimensjonene til de nye servomotorene, rotasjon, ny produksjonsmetode og sammenstilling med det de andre har 3D-modellert.
Forrige uke brukte jeg laserkutteren som produksjonsmetode, men denne uken har Ole Martin bidratt med sin 3D printer og fillament, noe åpnet det opp for andre typer design.
Her er mitt bidrag denne uken:
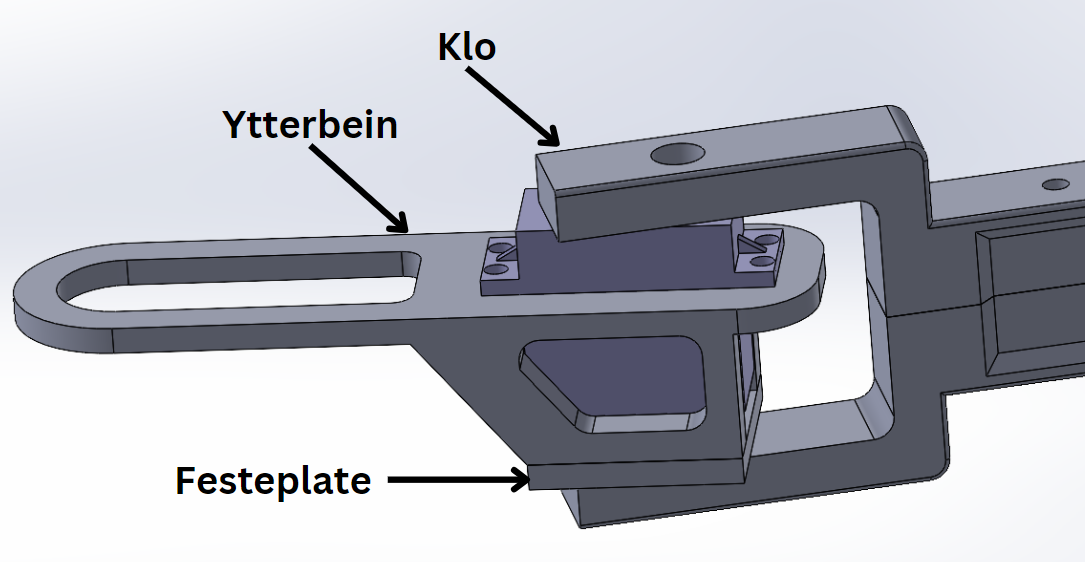
Servomotoren er skrudd med fire skruer til ytterbeinet. Festeplaten er skrudd med fire skruer til ytterbeinet. Kloen er festet til utgående akselen til servomotoren og leddet med en styrepinne på undersiden av festeplaten. Med samarbeid med Kristian fikk jeg 3D modellert kloen, slik at dimensjonene og rotasjonsmulighetene tilsvarende Kristians bidrag.
Ole Martin:
Den tredje testbenken er nå ferdig designet og er under produksjon, men vi avventer leveransen av de nye servomotorene.
I denne runden har vi valgt å produsere delene ved hjelp av 3D-printing, noe som gir oss større frihet i designprosessen.
Denne uken har jeg hatt ansvar for den nedre delen av testbenken, som festes til bordplaten. Her har jeg endret skruefeste mekanismen slik at den nå passer til de fleste bord som finnes på Krona. Den tredje testbenken gir oss også en verdifull mulighet til å teste et mer stabilt design for bevegelse i alle ledd, sammenlignet med tidligere versjoner.
Jeg har også hatt ansvaret for produksjonen av delene til denne testriggen.
Har også begynt å se på muligheten/nødvendigheten av demping på edderkoppen og startet med testing av noen fjærer/støtdempingssystemer.
Kristian:
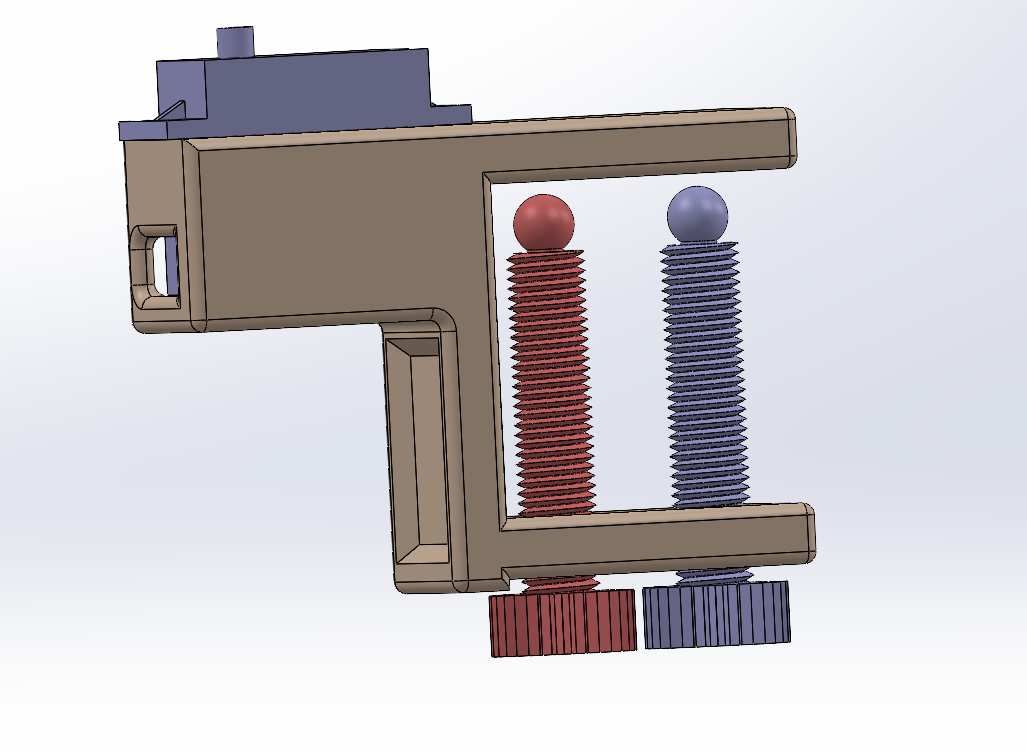
Jeg har hjulpet med å lage enda en prototypemodell, denne gangen med utgangspunkt i 3D printing. Dette gir oss mer frihet i designet, men vi må også passe mer på at den faktisk kan lages. Jeg har samarbeidet med Ole Martin for å lage en holder som festes i begge ender av en motor. Her trengte vi en ny måte å feste motoren til delene, siden 3D printing ikke printer smått nok til å kunne feste på tannhjulet. Det løste vi ved å bruke en laserkuttet trebit som settes inn i delen. Jeg har også samarbeidet med Vinay på ‘kloen’ (midtdelen av armen). For at motorene skal kunne passe inn, må den printes i to deler som skrus sammen.
Martin:
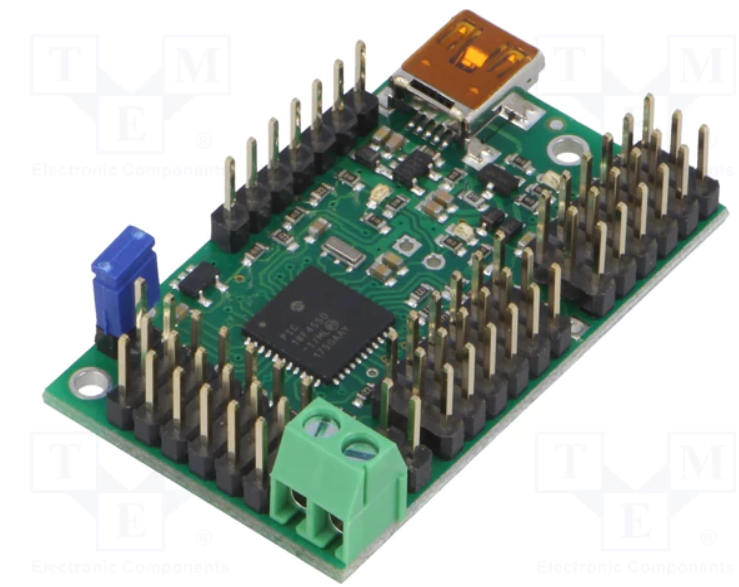
Denne uken har jeg gjort research på alternative komponenter. Siden vi skal bruke 18 servoer (3 per arm) og det bare er plass til 16 servoer på 1 modul så er alternativene å bruke to identiske moduler eller å kjøpe en større.
Det andre område jeg har sett på er strømforsyning. En idé er å teste et batteri fra en rc-bil. Disse tåler en trøkk og klarer forhåpentligvis å levere nok strøm til alle servoene samtidig. Det er mulig vi må ta høyde for at det kommer til å gå ganske store strømmer da alle servoene fyrer av samtidig. En annen ting er at dette batteriet er 7.4v. Raspberri pi’en trenger 5v. Her må litt hokus pokus til. Eventuelt må jeg konsultere med en elektrostudent. (Vi har ikke en på gruppa)
Videre utforskning av invers kinematikk står på vent helt til vi får de nye motorene. Det er helt håpløst å få presise målinger av nåværende løsning med servoer til 2 kroner limt fast på tannpirkere.
Aktuell kandidat til bedre servomodul: Pololu Mini Maestro 18 kanal
Didrik:
Denne uken så har jeg og Ida sett på å muligens benytte Unity til å simulere en av robotens arm, men etter litt diskusjon så kom vi fram til at tiden vi brukte på det mot informasjonen vi kunne få ut av det var bedre brukt andre steder som for eksempel UML eller hvordan framtidige sensorer sender informasjon til systemet.
Bjørn Ole:
Så langt denne uken har jeg jobbet litt videre med diagrammer. Har sett en del på klasser og ulike funksjoner som systemet skal bestå av. I tillegg til dette er en del av tiden blitt brukt på å se på hva slags sensorer som er best til vårt bruk og hvordan dataene fra disse kan brukes til å bestemme systemets arbeidsmønster.
Ida:
Didrik og jeg har sett videre på Unity som simuleringsverktøy, men som han skriver over her, så har dette blitt lagt til side for å kunne bidra på andre deler av prosjektet. Jeg har satt opp en Raspberry Pi og fått tilgang til den via SSH fra min laptop. Dermed har vi nå mulighet til å kontrollere Raspberry Pi eksternt.