Felles
Denne uken har vi i fellesskap sett en del videoer av andre som har gjort prosjekter i samme stil som vi holder på med nå. Det har vært hjelpsomt å se hvordan andre har fått det til, og spesielt hvilke ting som ikke har fungert.
Maskin
Siden konfigurasjonsideen for bordet er på plass, har vi gjort mer research i henhold til funksjonaliteten.
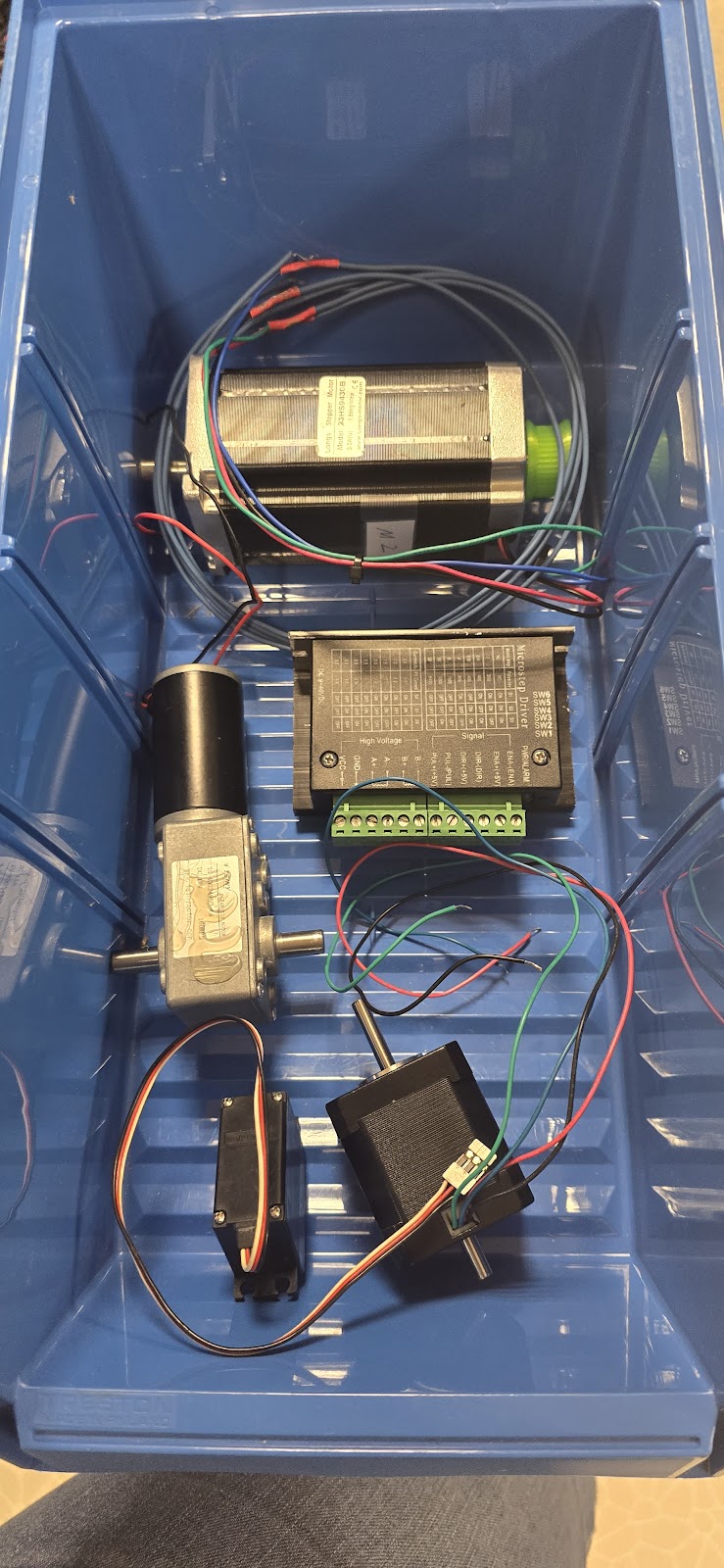
Vi har fått diverse motorer for å begynne med testing for hvordan denne konfigurasjonsideen vil fungere i praksis.
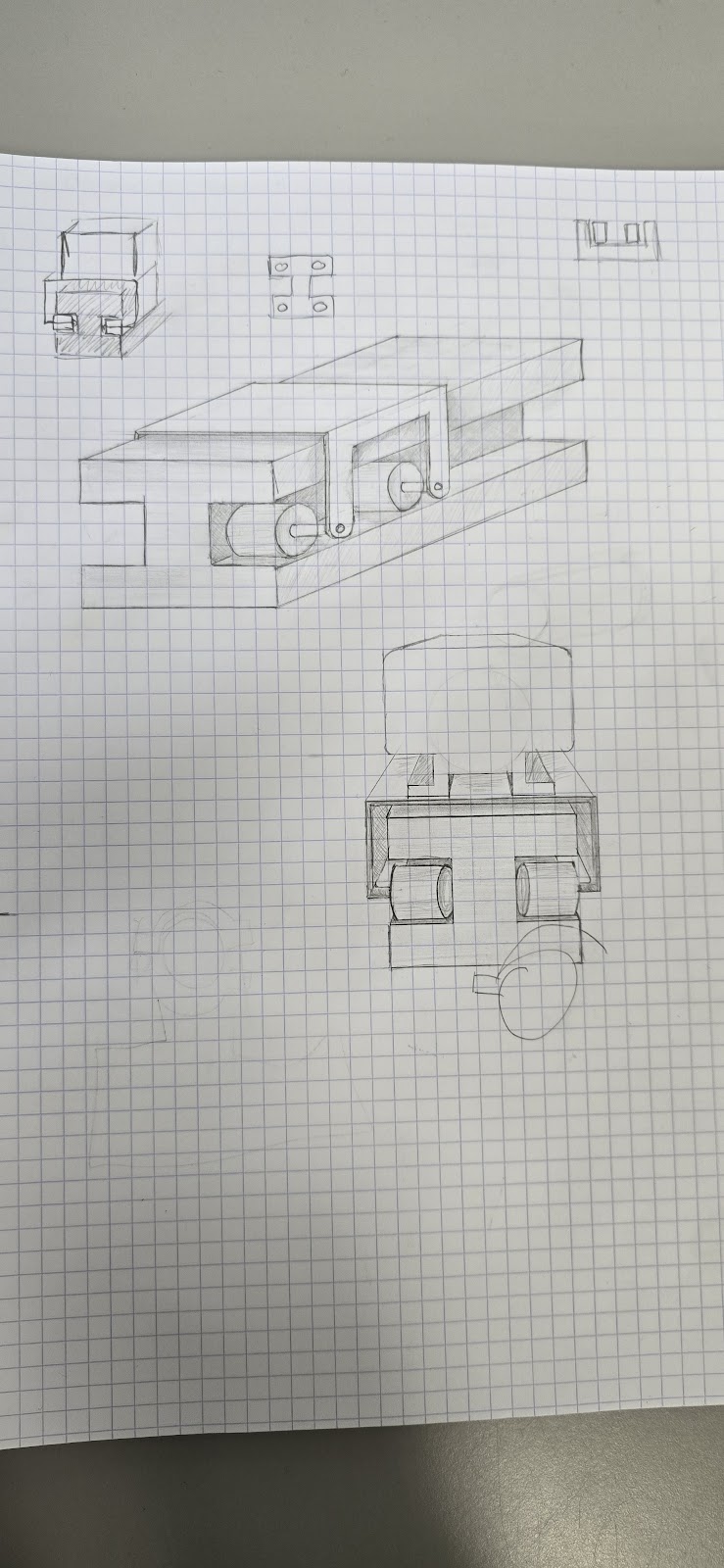
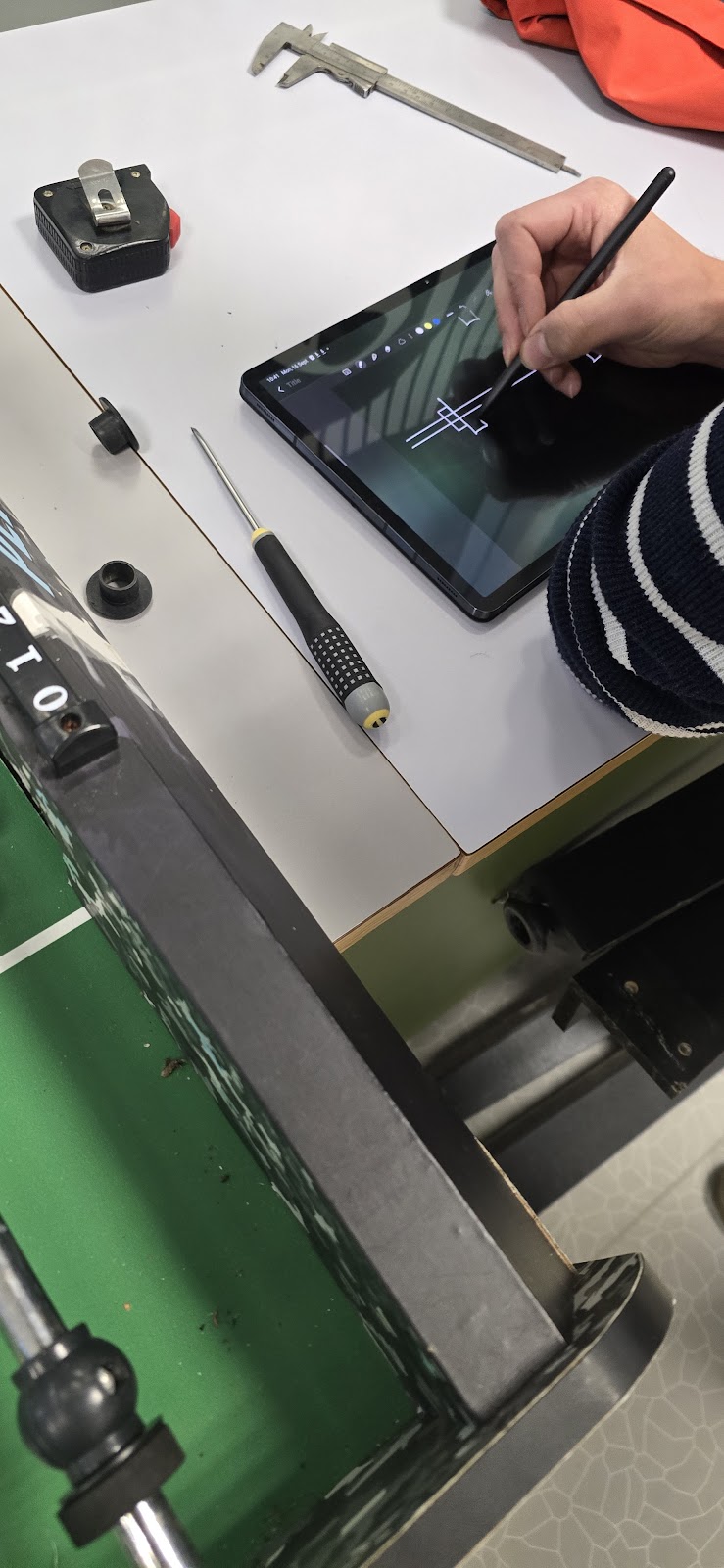
Fusball bordet som trenges for prosjektet er hentet og videre skal vi 3D modellere en simpel versjon av bordet, slik at vi har sammenstillingen med alle mål som trengs for modifisering av bordet.

Data
Vi har sett nærmere på kommunikasjonen mellom Arduino og Raspberry Pi. Vi skal bruke raspberry PiCamera V2 video module for å spore ballen. Dette vil mest sannsynligvis bli gjort med openCV. Ettersom det er vanskelig å fastslå helt hvilket programmeringsspråk å bruke ennå, så vil det være testing av både python kode og C++ kode, i noen tilfeller. Første problem med kamera modulen. Kabelen er visst nok for stor for Pi 5, så det må bestilles en ny kabel som passer inn til Pi 5.
Elektro
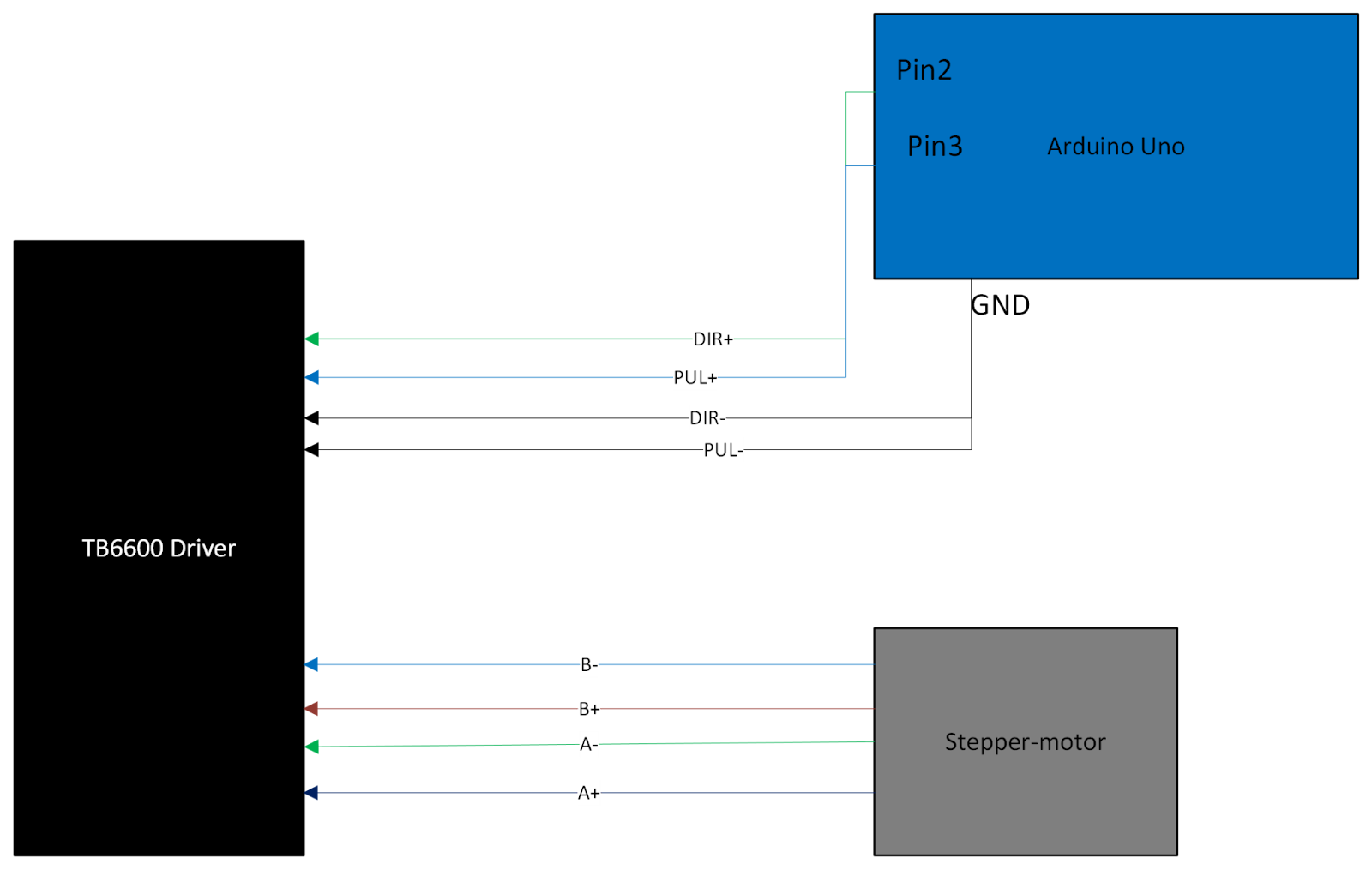
Denne uken har for det meste gått i å finne ut av hva som trengs for å styre motorene både rotasjon og horisontalt. Den originale planen var å bruke et Arduino Uno brett med pulsbreddemodulasjon for å styre motorene, men har funnet ut at dette vil fungere dårlig med step-motorene vi skal bruke. Har derfor funnet ut at det beste vil være å bruke en step-motor driver som styres ved hjelp av digitale signal, istedenfor pulsbreddemodulasjon. Neste uke skal vi prøve å lage noen kretsskjemaer for oppkoblingen av systemet. Har også laget en enkel tegning for oppkoblingen av motor driveren vi har tenkt å bruke:
Hva er neste steg?
Neste uke starter vi for fullt med testing av motorer og diverse elementer som må produseres for prosjektet.