Jon-Eirik – Week 3
Monday this week we started looking towards what sensors we could use. Steven helped us find some KY003 magnet sensors that we can use on our board to read if a chess piece with a magnet underneath is above it. We tried the 2 sets of magnet Steven had, one was too weak and didn’t send a signal through the scraps we tested with, and the other was too big and strong. We are looking for a perfect fit magnet now, so it will fit perfectly with our pieces as well as be well readable for the sensors under the board.
We also discussed and put into Jira what we are working on for the upcoming week as well. Where the 3 of us computer engineers are trying to get stockfish to work with python/Arduino.
Kristian – Week 3
This week we’ve started looking into how we want to “read” a chess move, when a chess piece is lifted and where it is placed. This is especially important for the human chess move, because the robot needs to know what move the human has done to calculate its next move. After a conversation with Steven we figured out that a type of magnetic sensor and a magnet could help us achieve the “reading” we needed. Now we had to figure out how thick the chessboard could be in order to make the contact between the magnet and sensor work. The first magnets we used were quite small but strong enough to “read” through a thin piece of cut off wood. Later I met Steven again to check if the bigger magnets were an option which they weren’t. These magnets were so strong that they were almost impossible to pull apart and too big for our chess pieces. This resulted in two options. 1: use a thin chess board or 2: buy magnets. Stay tuned 😀
The sensor and magnet testing was done collaboratively


In picture 1 you can see a RFID reader which was one of the other options we briefly looked into. We opened the keychain version to assess the size of it, but concluded that this would be more work than a magnet sensor. keep in mind we need 64 sensor 🙂
Picture 2 shows the analog discovery and the sensor we used (ky-003 magnet sensor).The program we used to send power was the waveforms software.

The magnet size we used is strong enough to penetrate this thin board.
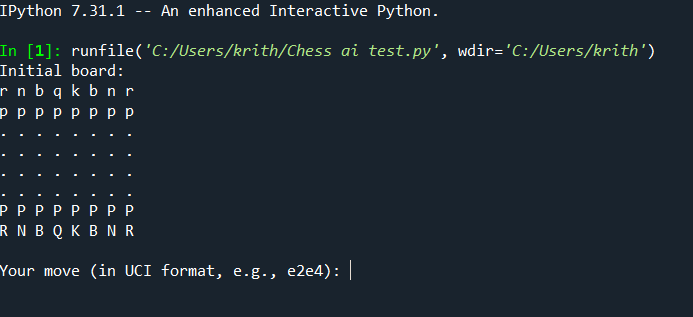
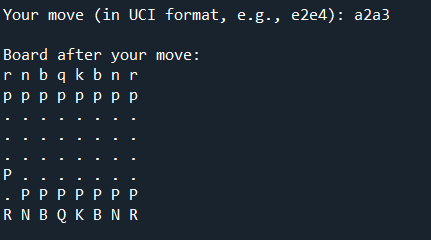
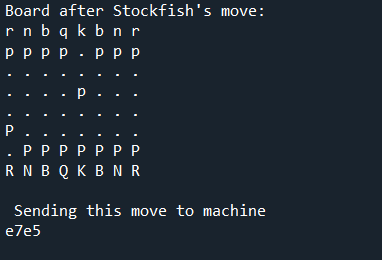
The stockfish code has now been edited in such a way that the human is starting instead of the AI, which is what we want when playing vs our robot. I also figured out how to “access” the AI move in code which will make it easier for us to send the AI move to our machine. Earlier it was only possible to watch the AI chess move as a letter moving.
Ulrik and Sondre – Week 3
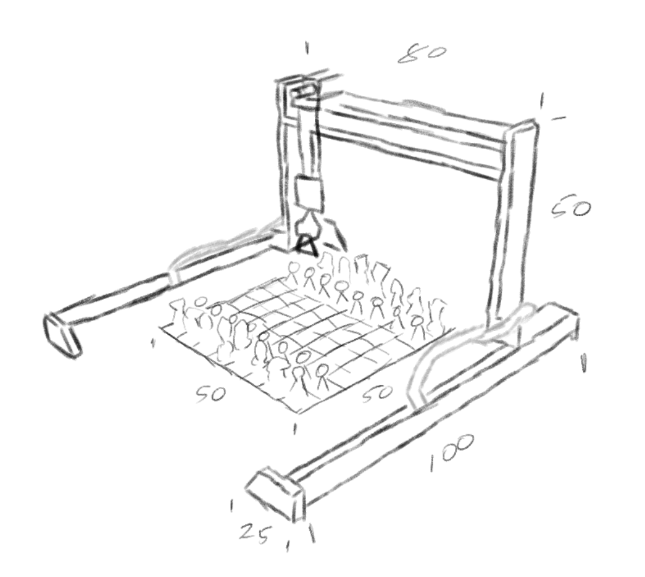
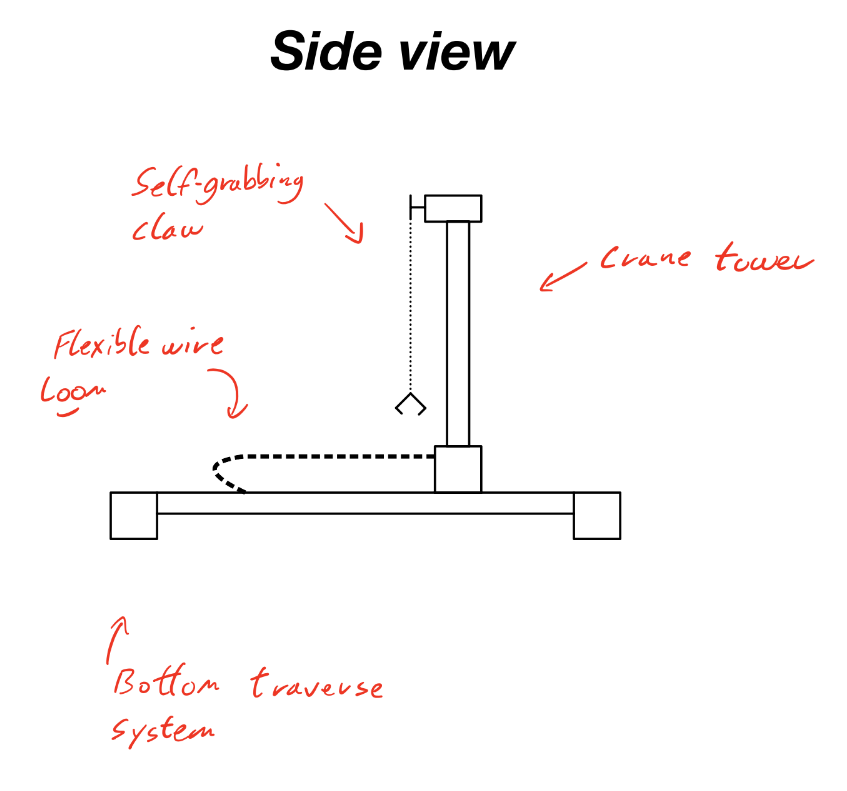
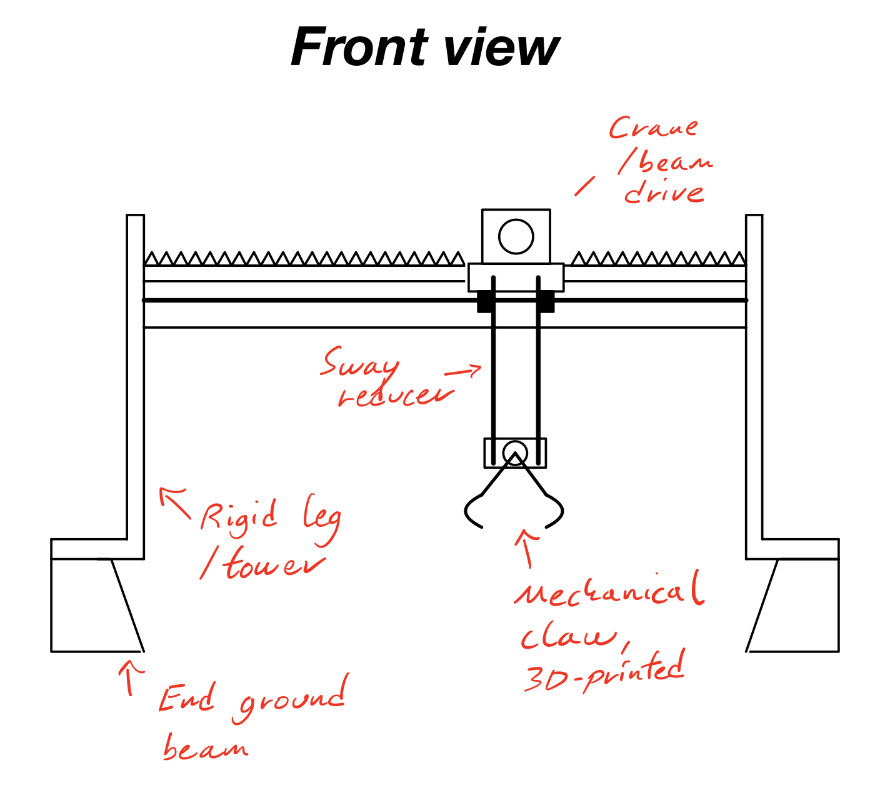
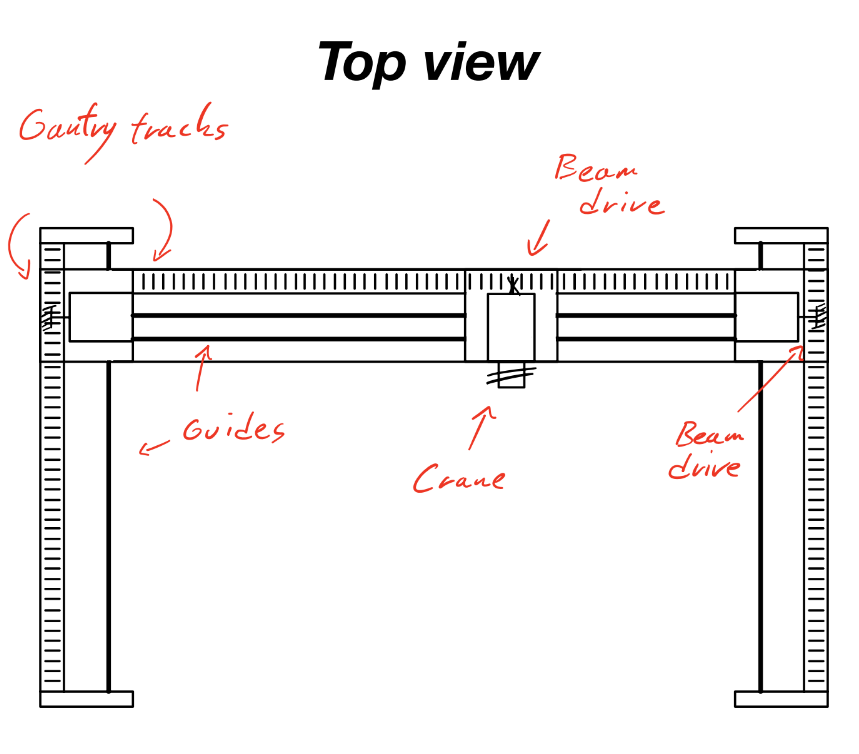
The group have started to use ‘Jira’ for assigning tasks and the mechanical engineering students were assigned designing the chessboard and the frame(gantry-system) that will operate as the AI’s “arms”. We went over a few of the earlier concepts that the group had come up with. After some modifications we decided that the system should be attached to the chess board to keep things rigid, but as a standalone-system.
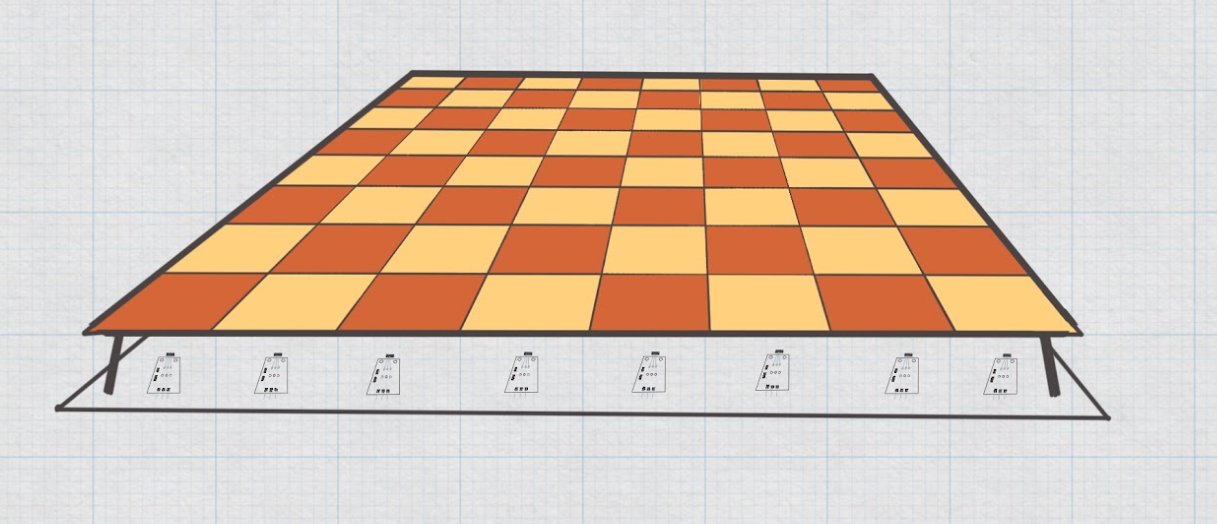
The operation in the Y-direction should be on ground level, and the operation in the x direction should happen on top. This will make the access to the chessboard easier for the human player, because the gantry can retract after each move and the need for a top frame is no longer present. Sketching ideas and measures for the new design is made. We have started to design and roughly cad the chess board and are looking at solutions to best integrate the magnet sensors into the board. Currently a “multilayer pcb” design is most likely. And plans for next week (4) will be to continue data drawings and start the laser cutting of the parts.
Emil – Week 3
I’ve unfortunately been sick this week and haven’t been able to do much. But I have been able to have some thought prosses on how we are going to implement code to stockfish so we can use it for our sensors and make it work for our machine. As my other team members have written about, we are looking into magnetic sensors. To be able to add this as a usable product for stockfish we have to make a program that reads when ever a sensors is “not” used anymore and then make it type that position in the software, after that we have to make the sensor activate whenever the piece is moved on top of another sensor and then the program needs to write that position in the software. After the software has gotten 2 coordinates it can then send it to stockfish as its move.
For the next week I will focus on coding this with testing the sensors to make sure all that is ready for our Implementation.