Felles Innlegg:
Maskin:
Denne uken har vi fra maskin laget test rigg, som brukes til å teste servomotorenes funksjon. Ulike komponenter av test riggen har blitt fordelt på oss 3, for 3D modellering og produksjon. Vi har blant annet diskutert ulike løsninger og produksjonsmetoder. i tillegg har vi samarbeidet slik at de tildelte komponentene passer sammen.
Data:
Denne uka har data testet diverse servoer Martin hadde liggende på lur, samt diverse ymse servoer skolen har liggende og vi har konkludert med at den ene typen er for svak og den andre er helt feil type (kontinuerlig). Ellers så har det vært mye med tenking og studering av hvordan man skal få til samspillet mellom servoer for å få til bevegelsene vi har satt krav til. Oppgave til neste uke er å få satt alle disse tankene mer i system.
Individuelle Innlegg:
Vinay:
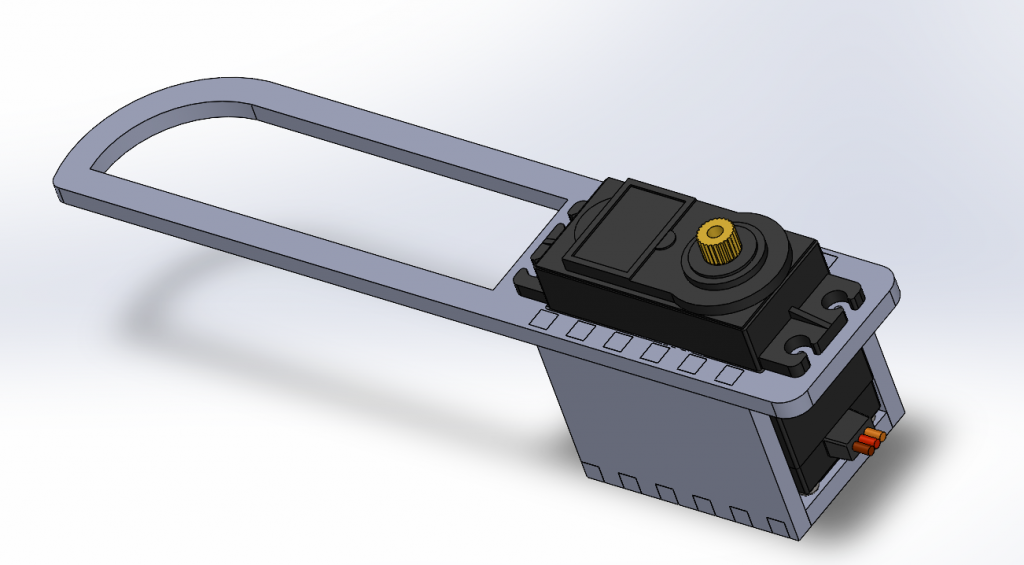
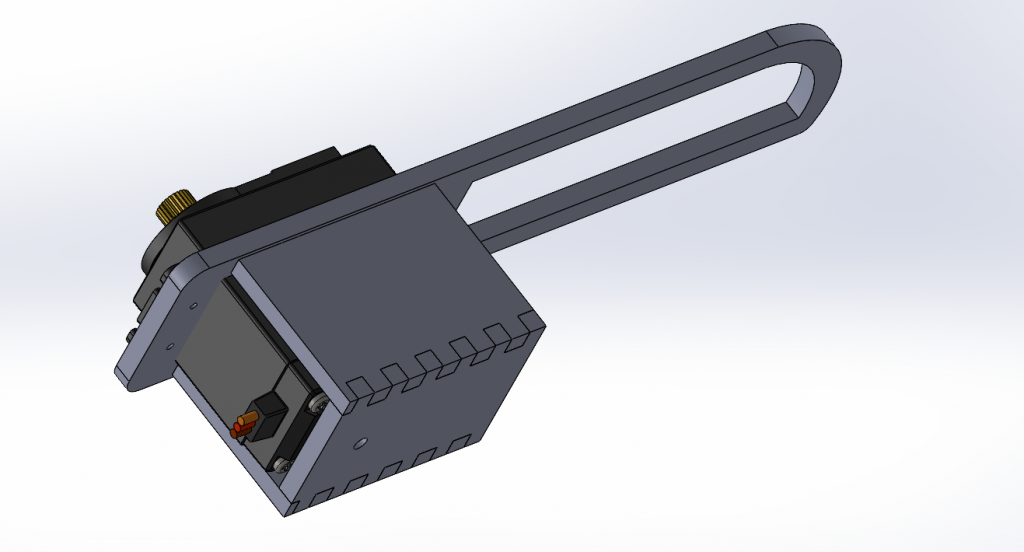
Denne uken har jeg 3D modellert og produsert komponenter til en enkel test rigg, slik at data kan teste servomotorene. Jeg hadde i oppgave å 3D modellere nedre del av riggen, hvor jeg måtte ta hensyn til 1 servomotor og hvordan min del skulle festes til Kristian sitt bidrag.
Jeg lagde derfor et bein/plate hvor servomotoren festes til og et hus rundt servomotorene. På motsatt side av servomotorens tannhjul lagde jeg et hull, slik at vi kunne få plass til en liten aksel der, som tillater rotasjon. De delene jeg 3D modellerte, skulle produseres med laserkutteren på skolen og limes sammen.
Her er mitt bidrag:
Ole Martin:
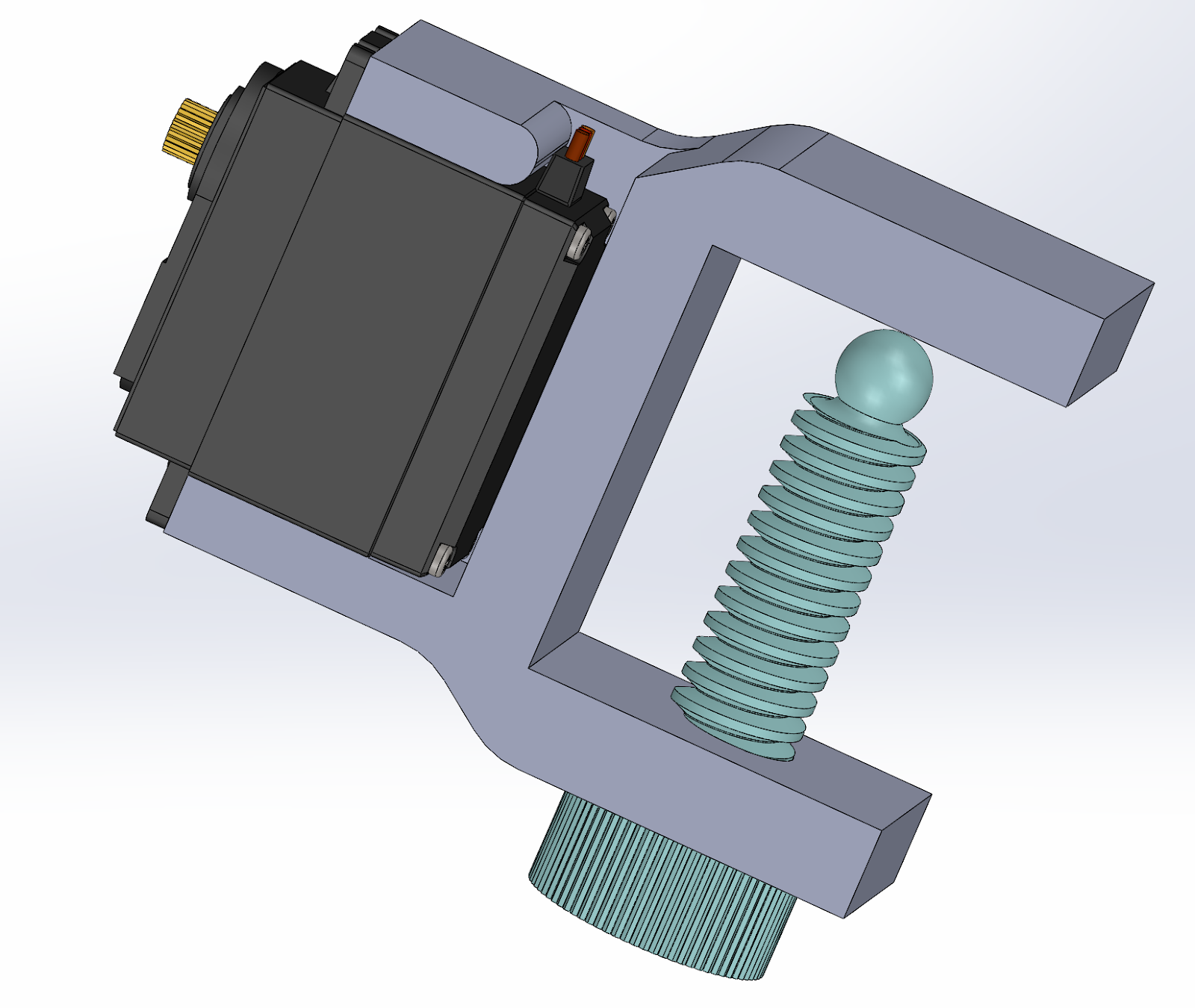
Det har gått en uke siden forrige innlegg, og ting har beveget seg litt fremover. Sammen med resten av teamet har vi klart å produsere en testarm for utprøving av en kraftigere servo. Mitt bidrag til dette var holderen som fester det nedre leddet til testbenken. For å forenkle testingen, laget jeg også en mekanisme for å feste holderen til en bordplate ved hjelp av en skrue.
I ettertid har det vist seg at avstanden mellom festepunktet og skrueanlegget ikke er optimal. De fleste bord på Krona har kort utstikk på bordplatene, noe som skaper utfordringer ved bruk av noen typer bord. Selv om modellen fungerer greit, planlegger vi å justere dette i neste versjon av testbenken slik at den passer bedre til flere typer bord på Krona.
I tillegg har vi mottatt en ny bestilling fra Itsy Bitsy Coders på en testbenk for større og kraftigere servomotorer. Denne skal kunne bevege seg vannrett i første ledd og loddrett i de to neste leddene, slik at de kan teste ut flere funksjoner.
Samtidig bruker jeg tid på å se nærmere på tidligere konstruksjoner av lignende produkter og lete etter publiserte artikler for å få bedre innsikt og kunnskap om hva som kreves for videre utvikling.
Kristian:
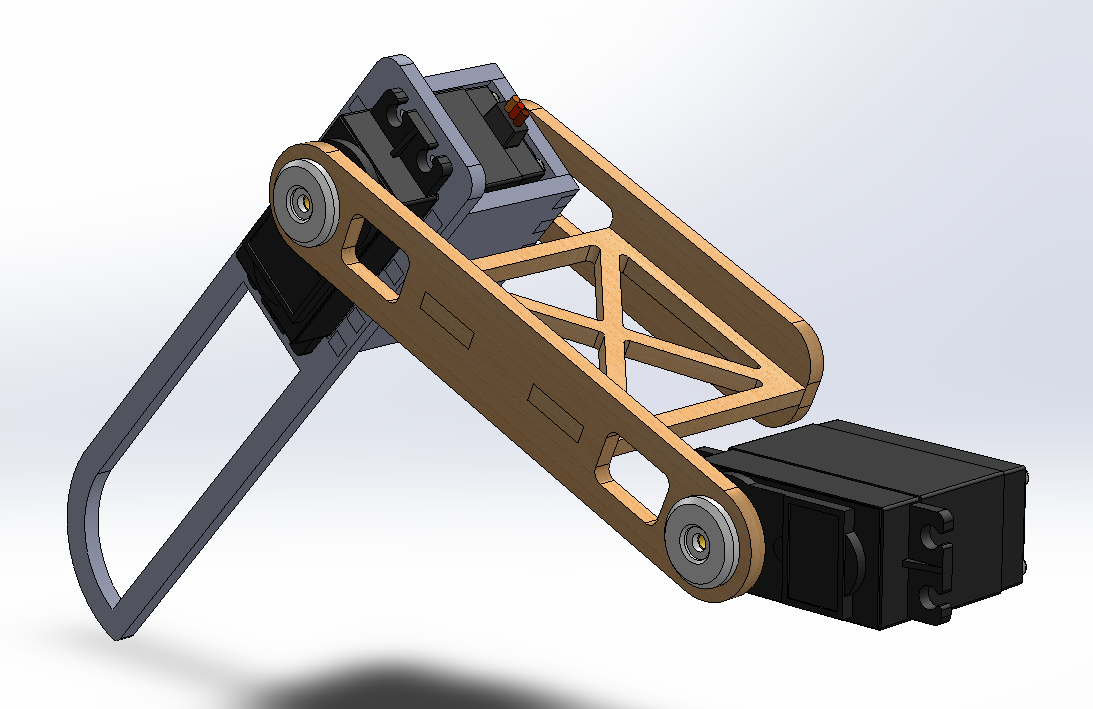
Mitt bidrag har vært modellering av midtdelen for den nye test-armen. På den gamle prototypen var armdelene festet rett til motorene, som gjorde det veldig ustabilt. Dette ble gjort verre av at det kun ble brukt ett lag med laserkuttet tre. Vi har fikset dette ved å gi armen en mer stødig konstruksjon, og lagd et ekstra festepunkt slik at den ene motoren slipper å bære så mye. Designet er ikke perfekt enda, men det er et steg i riktig retning. Planen videre er å lage enda en ny og forbedret test-arm for å teste flere motorer.
Martin:
Denne uken har bestått av opp og nedturer. Enn så lenge er arbeidsprosedyrene smått kaotiske, men det skjer da ting. Testingen min har bestått av først og fremst å få på plass tre servoer som fungerer samtidig. Lettere sagt enn gjort siden enten så er det jeg har funnet ødelagt, eller så er det feil type servo. Nå har jeg fått på plass tre av de billigste servoene og det er nok for å starte litt med testing og utforskning.
Første test med servoer gikk ut på å i det hele tatt få en og en servo til å bevege på seg. Det gikk gikk relativt greit. Jeg tror det bare er pga at de er billige og skrøpelige at de hakker. Mulig jeg tar feil og at det er noe pga strømforsyningen, men uansett så er ikke det veldig viktig enda.
Test nummer 2 gikk ut på å få servoene til å bevege seg samtidig. Her prøvde jeg to løsninger. Første løsning var med å lage en thread per servo. Det fungerte.
I den andre løsningen så flettet jeg PWM signalene inn i hverandre. Dette virket som at gikk hakket smoothere. Satser på å komme sterkere tilbake med litt mer teknisk beskrivelse enn “smooth” neste uke.
Annet enn testing av servoer så har jeg sett mer på invers kinematikk, men jeg er usikker på hvordan jeg skal begynne å oversette dette til kode.
All testingen har i hvert fall gitt en viss betryggelse om at det skal gå an å få til bevegelsene. Men, vi må nok få modellert litt og få satt opp en struktur og oversikt over kode som vi kan jobbe opp mot. Enn så lenge har vi bare en haug med testfiler.
Didrik:
Denne uken så har jeg vært med på å teste de ulike servoene samt sett på hva koden vi benytter nå kan utføre og hvilke begrensninger den har når det gjelder
Bjørn Ole:
Denne uka har bestått av å lese meg opp og finne ut hva slags typer av sensorer vi kan bruke og hvordan disse kan implementeres med Raspberry Pi. I tillegg har jeg begynt å sette opp UML-diagrammer. Disse blir jobbet videre med i neste uke.
Ida:
Uke 3 har gått til å lese smått om invers kinematikk. Jeg har også sett på hvordan å bruke Unity til å simulere ulike prosjekter. Planen videre blir å bruke vår egen modell i Unity for å teste ulike koder.