09.09.2024 – 15.09.2024
“Always do more than is required of you”
-George S. Patton
Group Summary
Dearly beloved,
yet another week has passed in the glimpse of an eye, and we are once again back with another blogpost to keep you all updated on our progress. As the weeks go by, we are working less with the planning details of our project and have now began focusing more on creating the physical project itself, both in terms of more realistic models and programming of the software. Our mechanical engineers have put together a shopping list of components to either get from the university or purchase independently.
Individual Summaries
Eirik (Data):
For my part, besides being the blog captain in charge of creating and publishing these posts, this week has pretty much been occupied by one single topic, computer vision. Mainly computer vision in Python, which is what we are going for in our system since we also would like the system to shoot back at the player, preferably by using a camera that is capable of identifying a person autonomously.
My main source for this topic has been this 37-hour long course video:
https://www.youtube.com/watch?v=IA3WxTTPXqQ
Robin (Data):
This week has been really exciting for me! We are closing in on finishing design for a prototype that we can start assembling and testing. To prepare for that, I’ve been working on learning Unity to try and create a simulation of how our project would look like. This week has been a steep learning curve, but I have created a manually controlled target system.
By next weekend I hope to have most of the simulations done, meaning there will be 2 moving targets, they will have some sort of pattern they go to (might not be random yet) and some sort of shooting and detection if a target is hit.
Fredrik (Data):
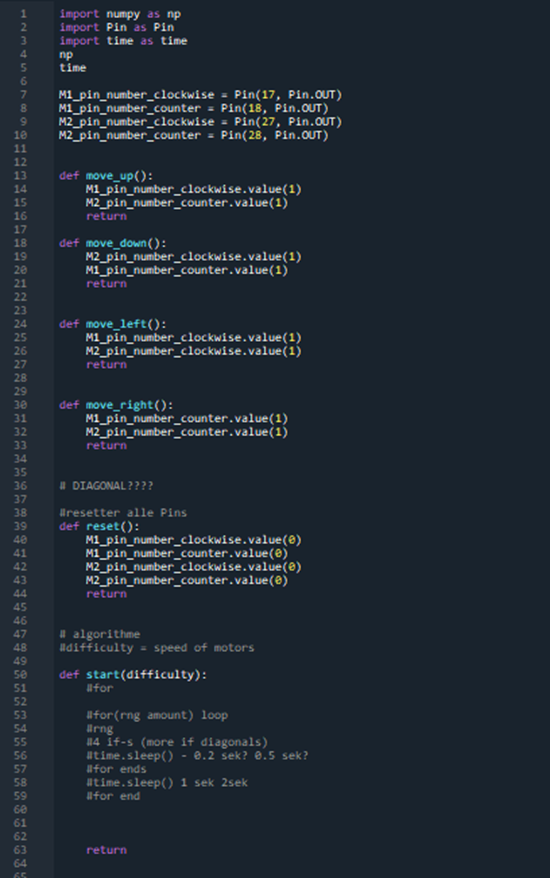
This week we started programming, so I started programming the code for the movement of the target, with hopes of having the code ready after next week. Definitely less than halfway but did get an idea of how the code will look like. Which was the main goal, so I have an overview of what I am coding. I have also planned on making the point system for the machine.
Vetle (Electrical):
I have been working on the circuit for controlling the stepper motors. I have decided to start using TMC2209 stepper motor drivers to drive NEMA17 motors. Since I already have some TMC2209 on hand it was the most logical solution. The TMC2209 modules I own have been designed for 3D printers, but it can be used for our purpose as well. Since it is made to be used for 3D printers it uses a common pinout used by multiple brands. If we require a higher current, we can just swap out the module instead of redesigning the entire circuit.
Kadir (Mechanical):
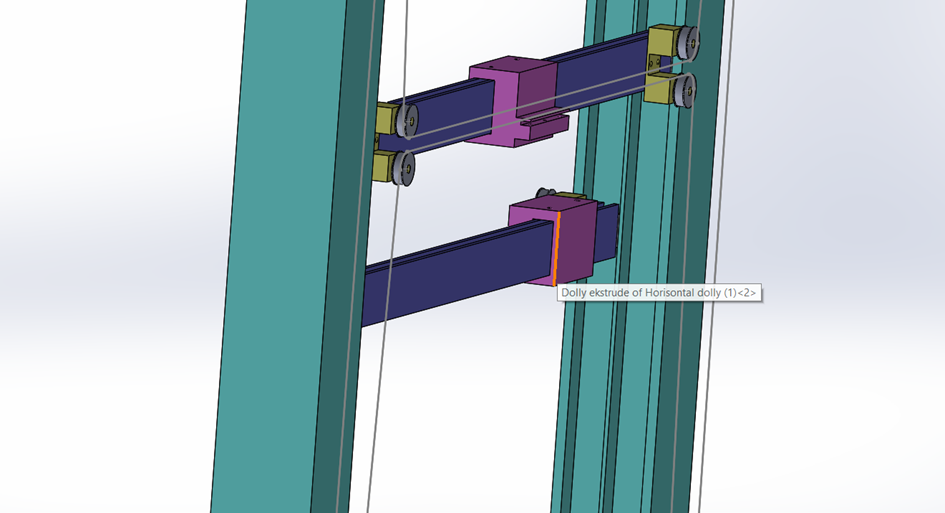
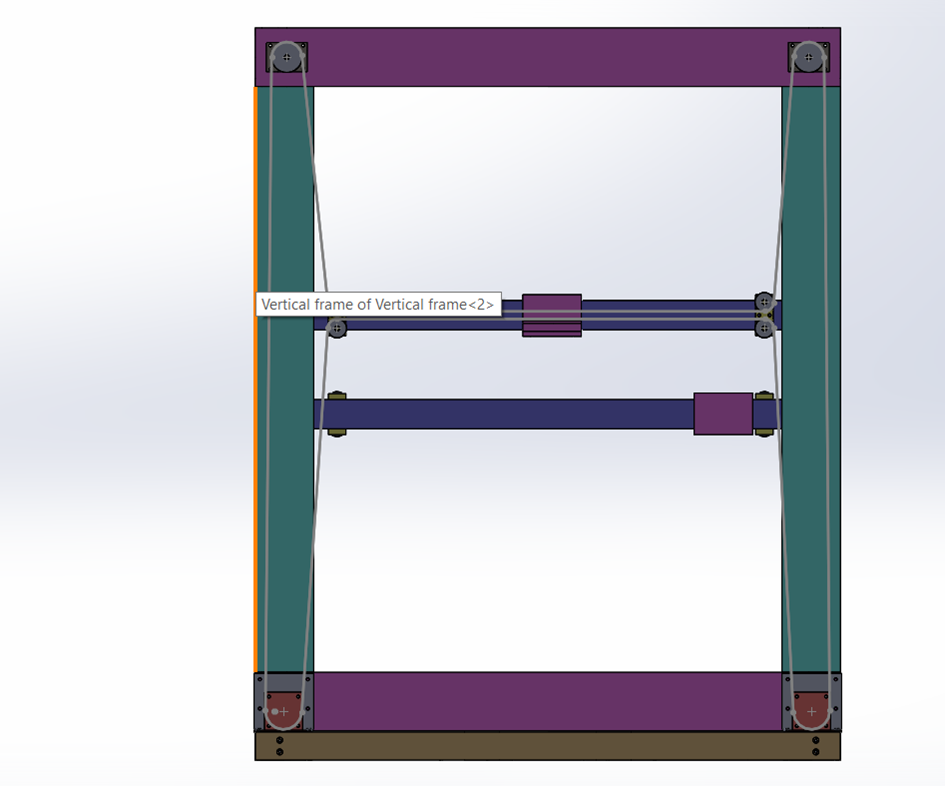
I started with Hans by modifying the main base that holds the target in the center, and then we added a second vertical and horizontal Dolly at the other end. This new dolly was equipped with additional motors, with precise adjustments made to the measurements and the movement of the targets to ensure smooth operation. Holes were created in the bases to secure the upper frames and connect them with the motors and wheels in the moving part.
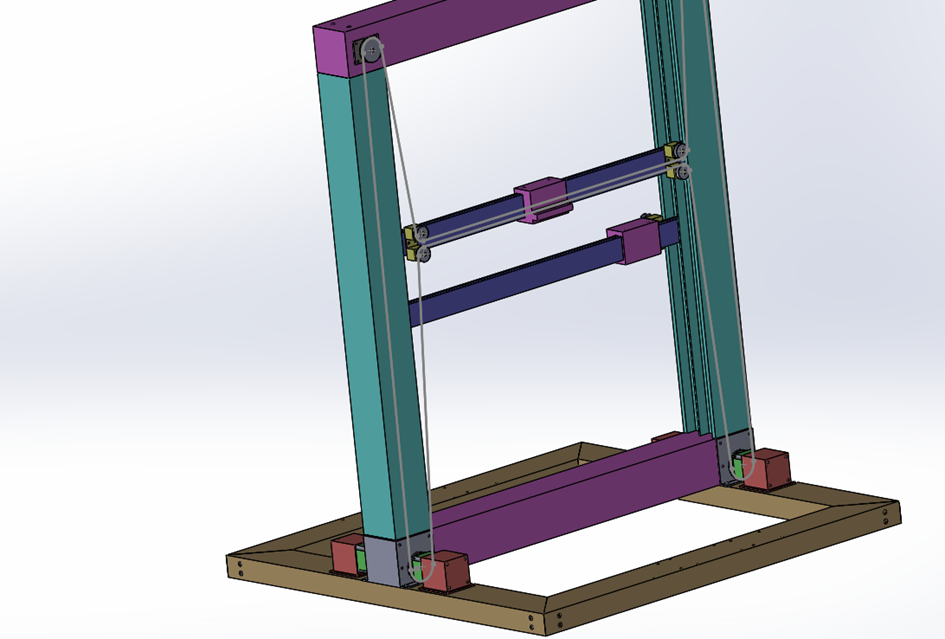
Hans designed the base and the framework that would support the moving target in the center. Afterward, I took on the task of assembling the various parts together, which helped create a cohesive and dynamic system. We also worked on designing the belt that wraps around the motor frames to ensure smooth movement.
Hans (Mechanical):
I have worked with Kadir, and we have prepared and designed the base and the framework and wheel bearing, and I have prepared a list of items that we need to purchase or fabricate within the university, focusing on improving the materials to achieve the required durability. After conducting initial tests on the system, we made some adjustments to enhance efficiency and explored opportunities to improve overall performance by updating certain components and refining the design.
Training on stress simulations in SW.