Our Work Continues!
Mechanical team:
The mechanical team is currently ensuring that our design of the mechanical arm is sturdy enough to withstand the weight of bottles it will be handling.
We have finaly found a better and more reliable desing for the gripping system of our arm.
Pamela:
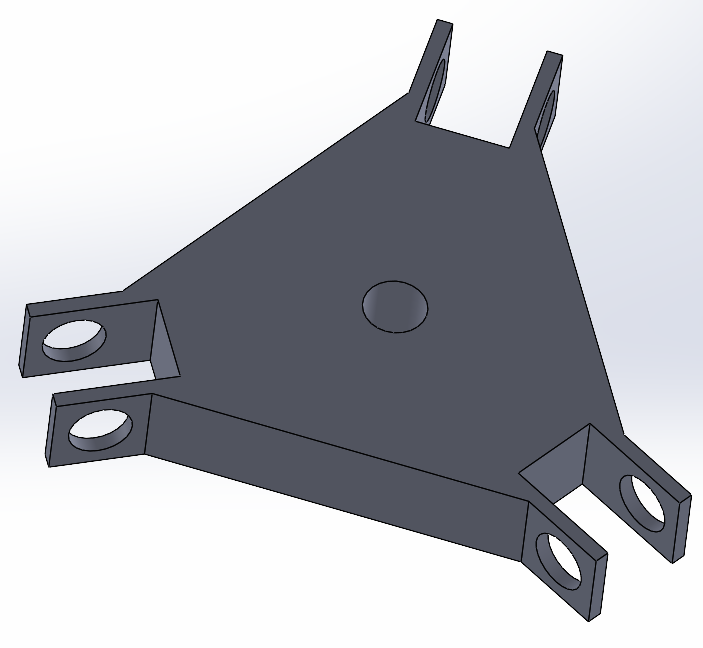
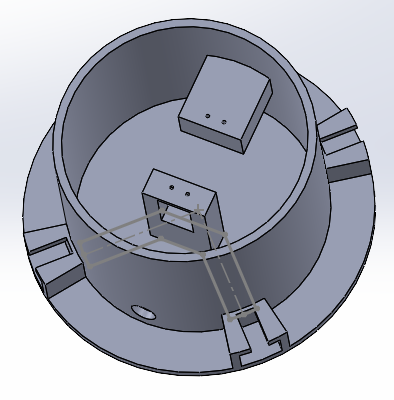
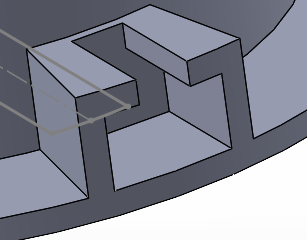
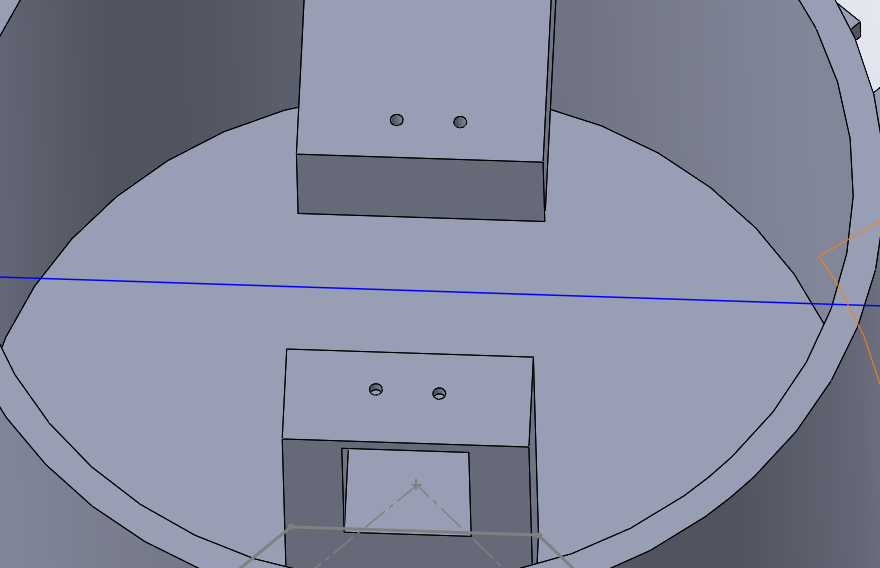
Me and Sergi thought of the new idea or mechanism to join the legs with the base as you can see in the 2n photo, then I did the two systems inside the base to ensure the properly suport of the electronic motors (servomotors) and the base plate. This is our final base for the moment.
Sergi:
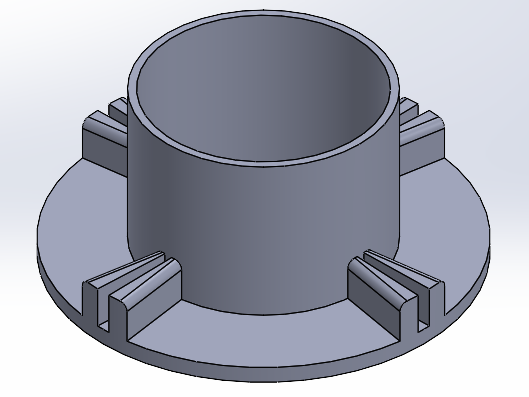
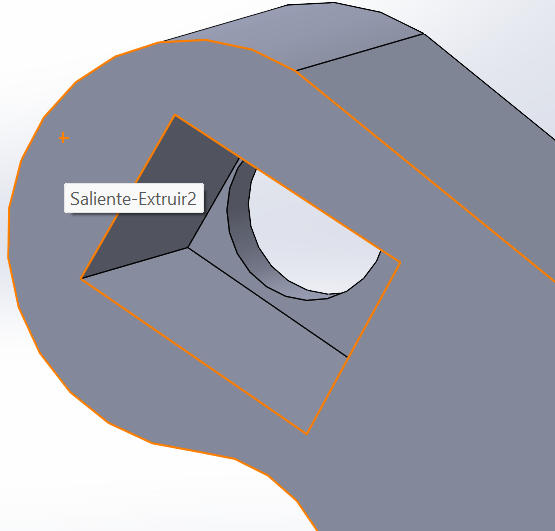
I did another look for the base, with a different system to gather or join the legs with the base itself:
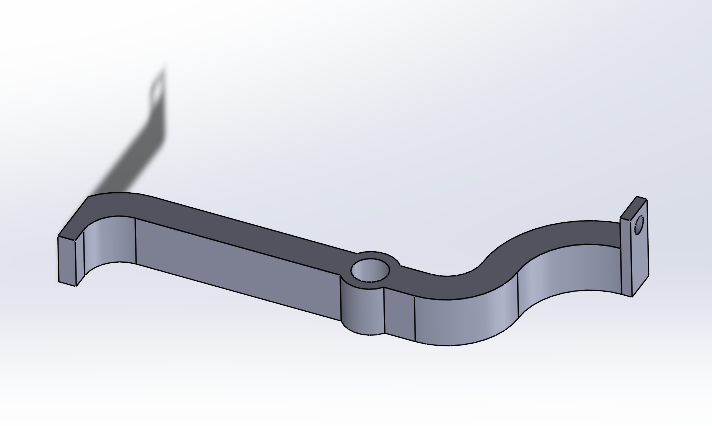
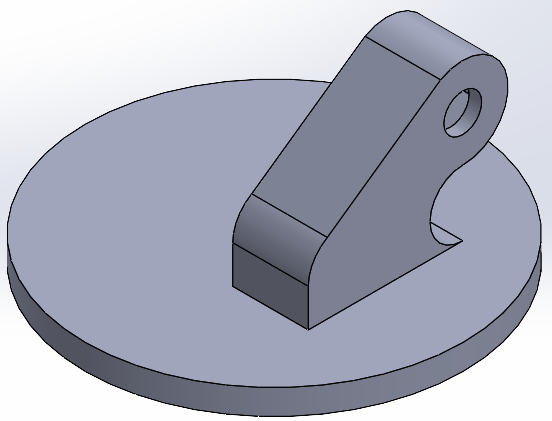
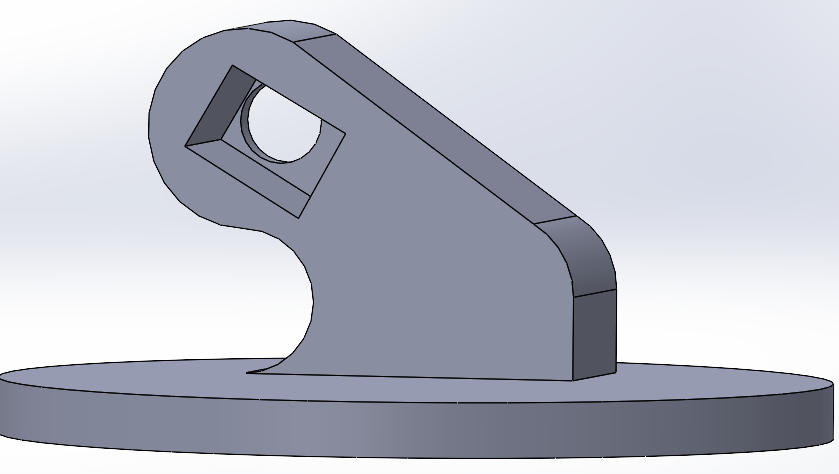
Also this week I made the piece that goes on top of the base and joins with the first robotic arm. Here are some photos of how it should look:
Programming team:
The programming team is steadily writing more & more lines of code for the arm. We are figuring out how to connect our sensors and more 3D testing is being done to fully determin our arm’s behaviours and ranges of capabilities.
Adrian
Following up with ROS, I’ve never used it before. So I’ve used this week to go through tutorials, especially focusing on ROS 2 and MoveIt 2. The package is quite massive and extensive, but the potential keeps my motivation and focus sharp. Of course, I’ve decided to use the Humble distribution, and the tutorials are their own official ones, given in their ROS 2 Humble documentation:
https://docs.ros.org/en/humble/Tutorials.html
Adam
This week after deciding on the design of the jaws I have stared making 3D models for assembly. Also was thinking about, if there is any way we can improve the design of the jaws, like having either 3 or 4 grips or if we can make it smaller to suffice our expectations for the priject.