Disse ukene har hovedsakelig gått til mye idemyldring og research for diverse komponenter vi har tilgang til. Dette har også innebært fastsetting det vi har behov for under prosjektet.
Tidligere har vi snakket om å bruke et kamera for å spore ballen. Ideen er å bruke Raspberry Pi 5 med et kamera tilkoblet. En (eller flere) arduino er tilkoblet til raspberry for å kontrollere motorene.
I tilegg til dette er det satt noen nye roller.
Nye rollefordelinger:
Document manager: Anders Moen
Blogg ansvarlig: Andrea Grubbe
Referat: Kristian Erik Myren
Programeringsannsvarlig: Erik S.
Maskin
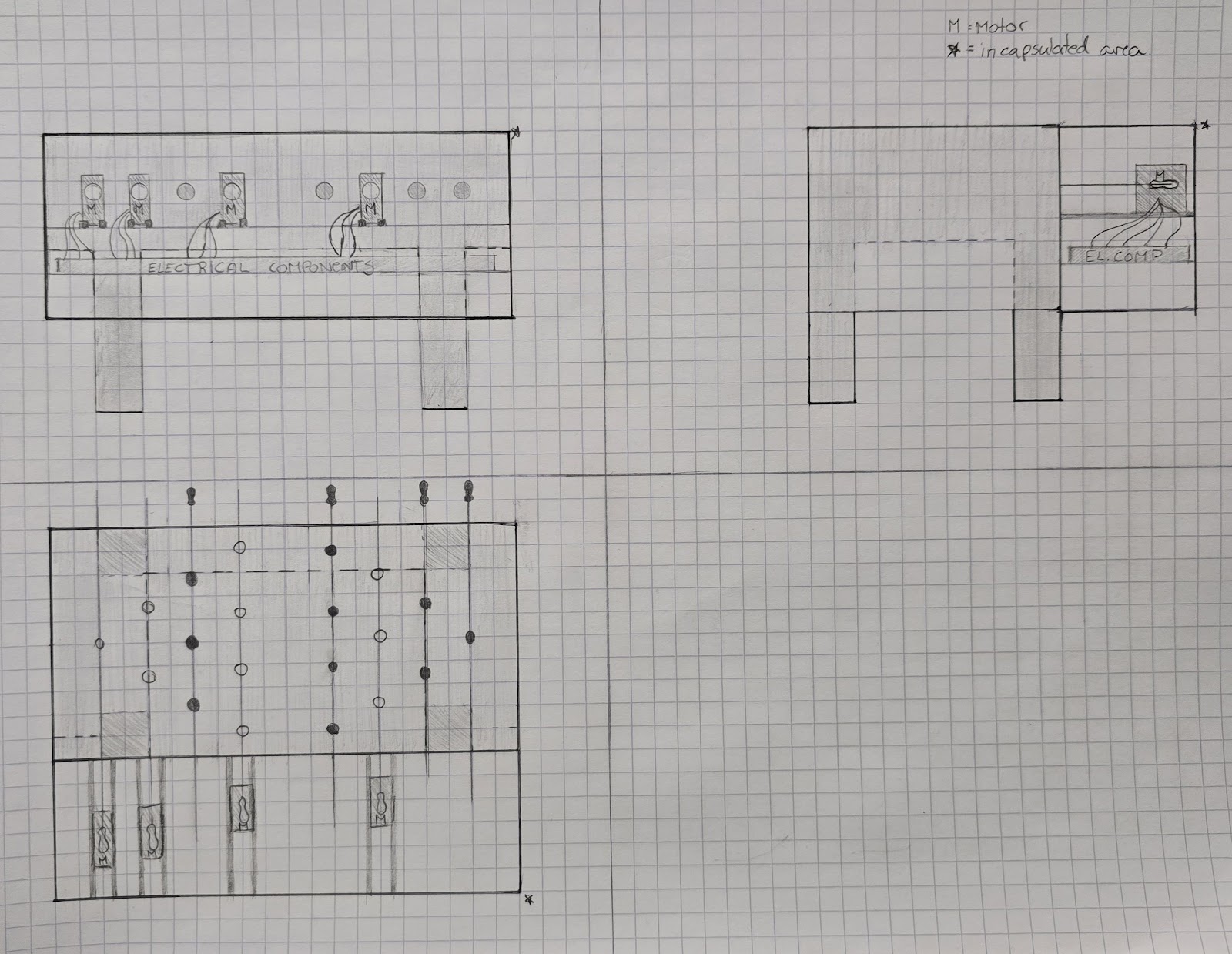
Denne uken har vi på maskin ferdigstilt initial skissene for prosjektet for bedre å visualisere utformingen. Research for diverse motorer er gjennomført og konsultert med elektro for å finne de beste løsningene. Dette videreføres til uke 4 for videre utforming av prosjektet.
Data
Har begynt med å utvikle tracking av ball i python med bruk av openCV, og startet med visualisering av tracking av ball i python med pygame. Har ish fått til tracking av en oransje ball i python med openCV, men som man ser i Mask.png, så er den ikke fullt kalibrert, men det kommer når vi har fått satt opp og montert det aktuelle systemer.
Elektro
Disse ukene har vi brukt på research rundt forskjellige sensorer som kan brukes til å spore ballen og hvilken metode som vil fungere best i dette systemet. Har undersøkt hvilke type motor som kan brukes og hvordan disse skal få sammenkoblet sporing av ballen med bevegelse av motorene.
De neste ukene håper vi på å få prøve ut noen av motorene slik at vi kan finne ut om bruk av Raspberry Pi og Arduino sammen påvirke hastigheten av sporingen?
Er steppermotor best? De er billig og enkelt og bruke med en mikrokontroller, men lager mer støy og vibrerer en del.
For å forbedre oss til dette har vi også forsøkt og feilet med å lage en simulering i LTSpice av en steppermotor.
Hva er neste steg?