Denne uken har vi kommet godt i gang. Vi har hatt møter med idémyldring og vi har begynt å sette opp utviklingsmiljø på en Raspberry Pi. Vi er i ferd med å lage en prototype så vi kan komme i gang med praktisk utforskning av bevegelsene i systemet.
Ole Martin’s bidrag til motivasjon er å fôre oss med godteri! (det funker!)

Fokus på A krav, ROS satt på vent
Forrige uke snakket vi om å kanskje bruke ROS (Robot Operating System) som rammeverk. Vi velger å legge den tanken på is inntil videre. Selv om ROS tilbyr mange spennende aspekter så får vi se på de mulighetene etter at vi har løst den største oppgaven vår: Finne ut hvordan vi skal få beinene til å bevege seg riktig.
Et skritt av gangen!
Som vi nevnte så er vi i gang med produksjon av en prototype. Det vil si, det blir mer som en testbenk. Vi har tenkt til å ha 6 ben på roboten. Det vil si at det blir 18 servoer vi skal kontrollere. Dette er en smått overveldende tanke, men er det noe vi har lært så er det å bryte ned problemer i håndterlige biter. Planen vår er å starte med ett ben. Vi må sette oss inn i matematikken for å kunne ha sjans til å utvikle algoritmene som skal til for å få til bevegelsene riktig. Etter det vi har lest oss frem til sålangt så er det invers kinematikk vi må sette oss inn i.
Didrik og Martin måtte lodde litt på servomodulen for å få den til å passe!

Individuelle innlegg:
Vinay:
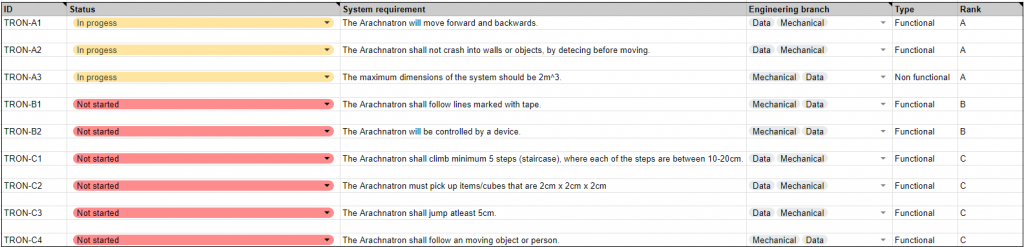
Denne uken har jeg jobbet videre med de funksjonelle og ikke funksjonelle kravene for prosjektet. Jeg har brukt tildelt vedlegg (https://www.nasa.gov/reference/appendix-c-how-to-write-a-good-requirement/) fra Steven og Richard for å gjøre kravene mer definerte. Ved at disse kravene er oversiktlige og definerte, kan gruppen enklere jobbe mot disse. Samtidig blir det simplere i testing og validerings fasen av prosjektet.
Her er oversikt over kravene:
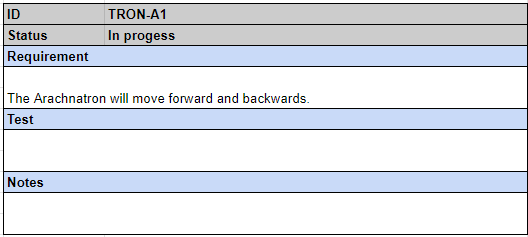
Hvert av kravene har i tillegg et eget skjema, hvor gruppen kan skrive inn notater og annet relevant informasjon:
Jeg har også brukt litt tid for å lære meg Jira. Jira er et agilt prosjektstyringsverktøy som gruppen skal bruke. Blant annet skal vi legge inn prosjektplanen/tidsplan, opprette sprinter, opprette mål og fordele oppgaver.
Ole Martin:
Uke 2:
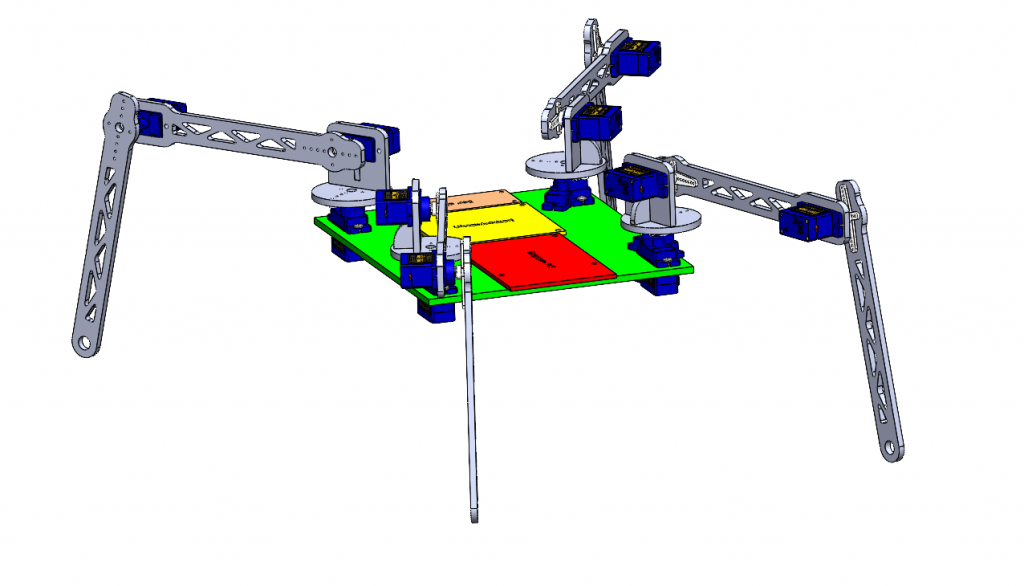
De første ukene har vi fokusert på å diskutere konseptet for vår edderkopp-robot. Samtidig har vi laget en enkel modell slik at data-teamet, Itsy Bitsy Coders, kan begynne å teste servoer og eksperimentere med ulike funksjoner.
Designet som vi i maskin-teamet, Spider Manufacturers, har utviklet er forholdsvis enkelt. Det består av kryssfiner med monteringspunkter for servomotorer og kretskort. I denne fasen undersøker vi også ulike designalternativer og konsepter for edderkoppens chassis og benkonstruksjon.
Uke 3:
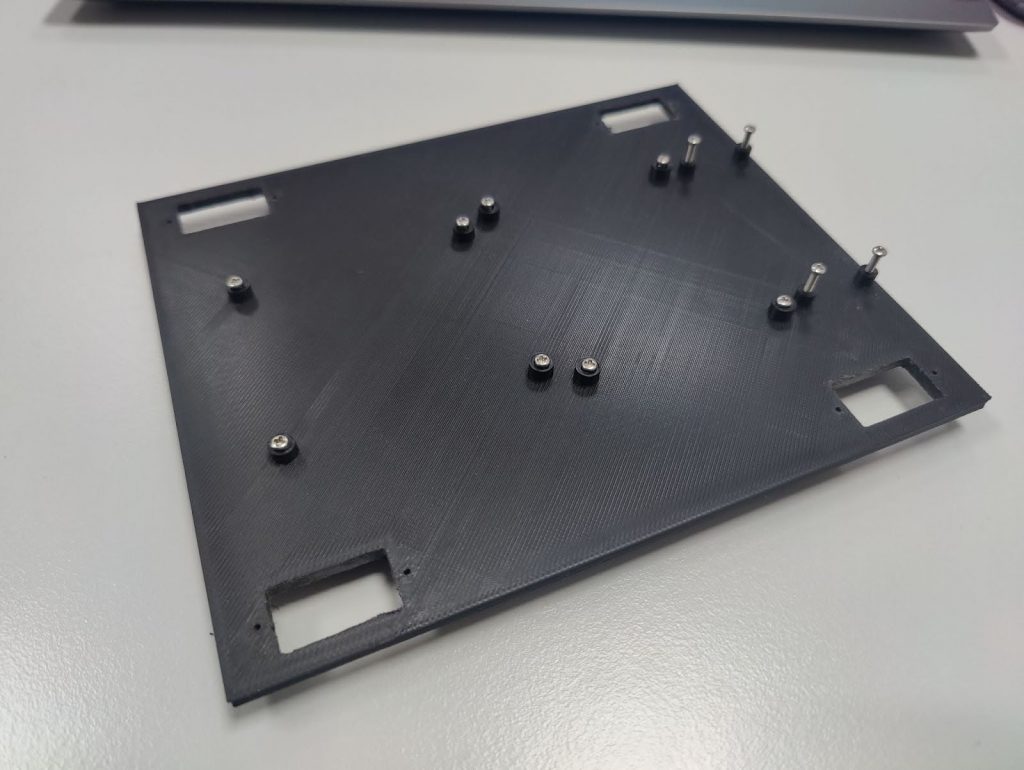
Tidlig i uke 3 redesignet jeg festeplaten for servomotorene og kretskortene. Her måtte jeg ta hensyn til komponentene som stikker ut på undersiden av kretskortene, slik som loddepunkter, festing av heat sink. Dette forhindrer at kortene blir utsatt for unødvendig spenninger ved montering og bruk.
Festeplaten har blitt 3D-printet i PLA med integrerte avstandsstykker for kretskortene. I tillegg har jeg kjøpt inn skruer og muttere for å feste kretskortet til festeplaten.
Vi i Spider Manufacturers jobber også med å lage en testrigg for større og kraftigere servoer, slik at Itsy Bitsy Coders kan bli kjent med disse og teste deres funksjoner.
Kristian:
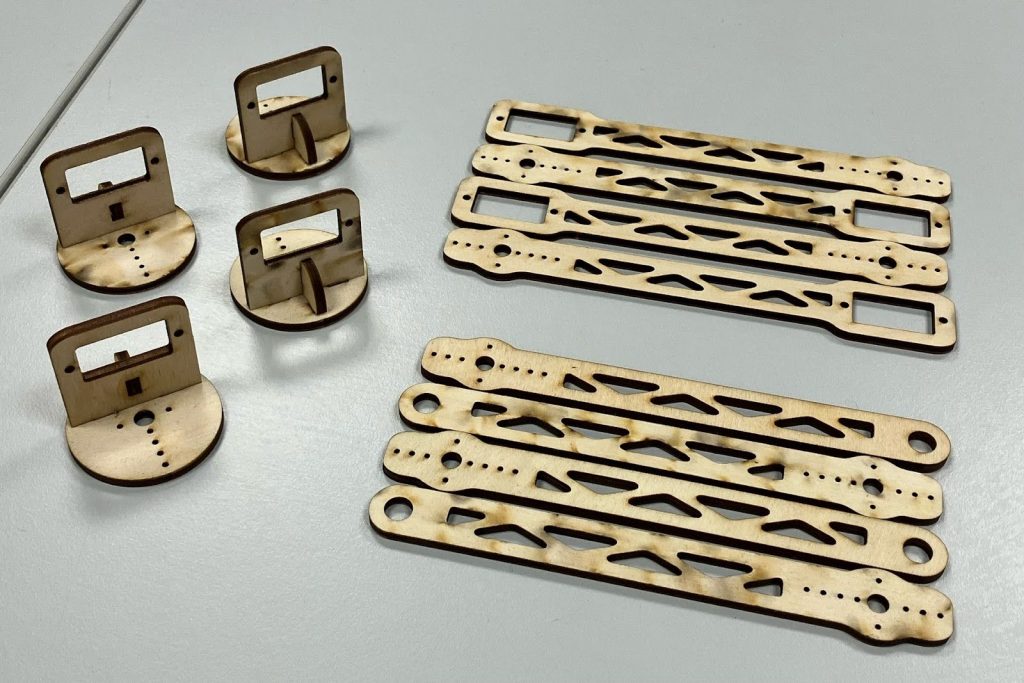
Min rolle så langt har hovedsakelig vært 3d modellering. Programmererne («Itsy Bitsy Coders», som de kaller seg selv) trenger en fysisk prototypemodell som de kan eksperimentere med, så vi fra maskin jobber med saken. Min del av jobben var å designe armene. Jeg tok utgangspunkt i en SG90 Micro Servo som vi har mange av, og modellerte armer og festeelementer. Deretter laserkuttet og 3d printet vi delene.
Martin:
Denne uken har hovedfokuset mitt ligget på å få satt opp et utviklingsmiljø på Raspberri Pi’en. Det vil si jeg har installert Raspberri Pi OS og jeg har drevet med å finne ut hvilke biblioteker vi trenger for å jobbe med servomodulen vi skal bruke (Adafruit PCA9685). Etter å ha fått første kontakt mellom Raspberri Pi’en og én servomotor, så jeg meg fornøyd med innsatsen, så nå er neste oppdrag å få inkludert hele datagjengen og å få satt opp et gitrepo som vi kan jobbe opp mot.
Testingen min av servomodulen var veldig kjapp, dvs. jeg bare stappet inn ledninger. Jeg og Didrik fikk loddet til en bedre løsning på fredag. Ellers har jeg ligget i fosterstilling og vugget etter de gangene jeg har sett på matematikken vi må skjønne oss på!
Didrik:
Uke 2 har jeg benyttet til å samle informasjon angående forskningspapirer på lignende systemer som våres for å finne mulige løsninger på problemer som vi ser her nå og mulige problemer som kan oppstå under utviklingen.
Ellers var jeg syk mesteparten av uken, men kom meg på beina senere og hjalp til med lodding av servomodulen.
Bjørn Ole:
Siden vi trenger litt arbeid utført fra maskingutta før vi kan se på programmeringen, har jeg den første tiden av prosjektet brukt på research av hvordan oppgavene skal løses fra data sin side. Å lese meg opp på ROS (Robot Operating System) da vi bestemte oss for at dette primært skulle brukes i vårt prosjekt. Videre har jeg brukt litt tid på å se på Jira, da dette er verktøyet vi har tenkt å benytte til prosjektstyring.
Ida:
Denne uken fastslo vi navn på gruppa og prosjektet. Vi diskuterte også ulike krav og prioritering av disse. Deretter gjorde vi research på tidligere lignende prosjekter. Jeg har selv lest på ROS for å få en forståelse for hvordan det fungerer.