Farah
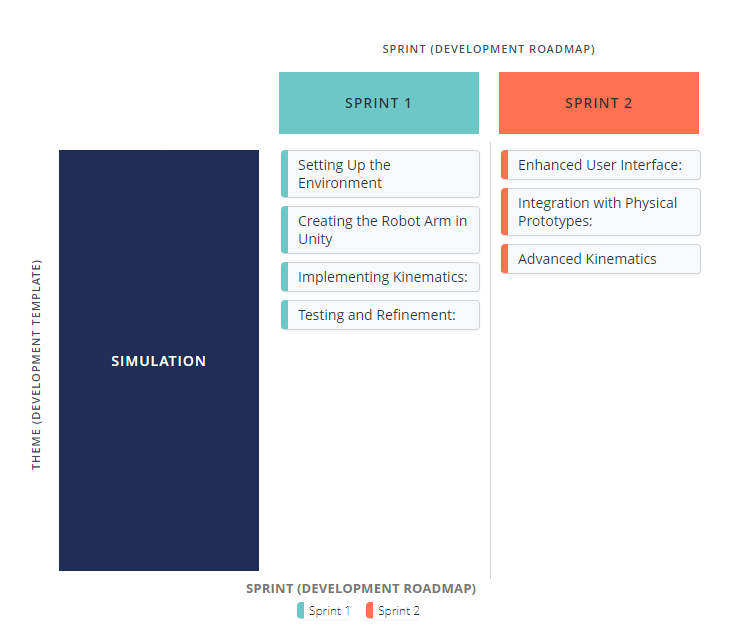
I was tasked with simulating a robot arm prototype using the Unity platform. The primary objective was to develop a functional and accurate simulation that could serve as a foundation for further development and testing of the physical robot arm. The Initial Research following the meeting on Monday, I began by conducting research on how to simulate a robot arm within Unity. My initial approach was to explore available online resources, including tutorials and documentation related to robotics simulations in unity. I came across a YouTube video that demonstrated a similar simulation process in Unity. The video served as an excellent tutorial, providing a step-by-step guide on how to create and simulate a robotic arm. I decided to follow this video closely to gain hands-on experience with the relevant concepts and tools. I am still in this phase in the simulation process.
Hare are some of the staff I will work on in coming weeks.
Links to Reassures I used.
https://www.youtube.com/watch?v=pJ4vvvWMybs&list=LL&index=1
https://www.youtube.com/watch?v=ZgyRlLimklg&list=LL&index=2
Pamela
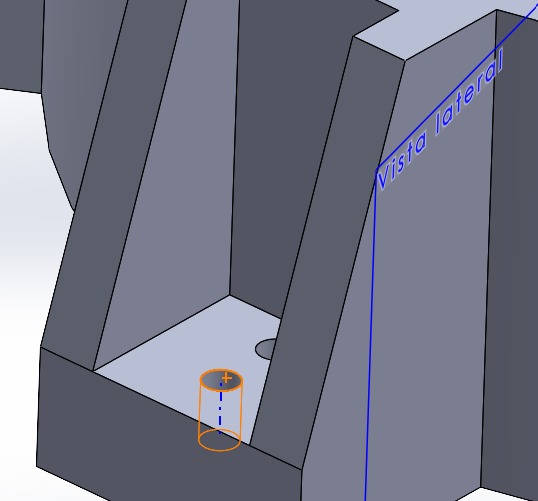
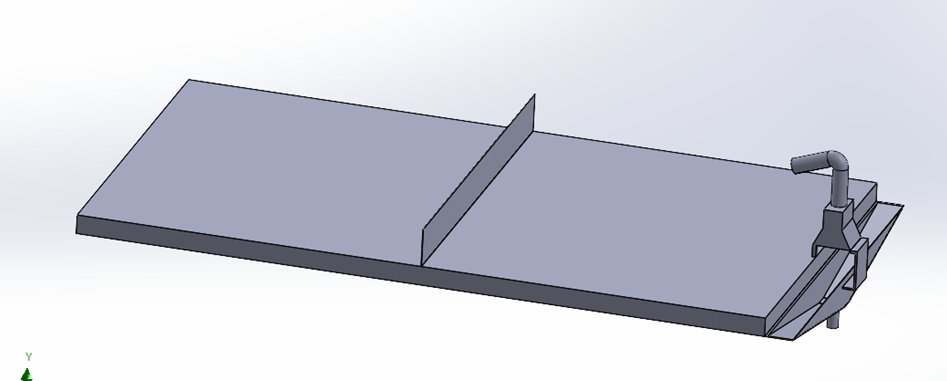
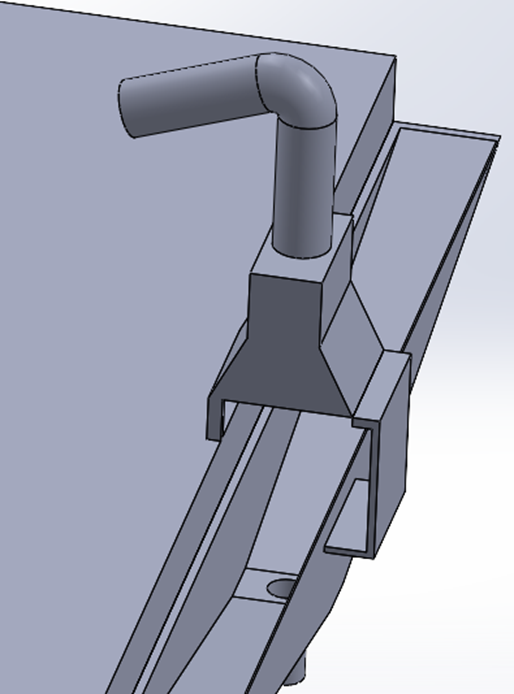
We met to determine the tasks of each member of the group, and we divided into two groups. The data students and the mechanics. I belong to the mechanics group, and we were tasked with doing the 3D pre-design.
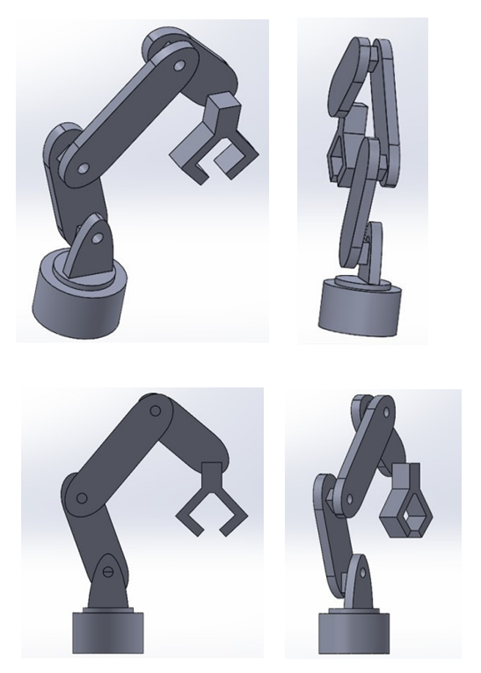
The initial design
Adrian
I have researched different coding techniques and methods in terms of coding industrial grade robotic arms:
- Point-to-point (PTP) programming:
- ABB RAPID, KUKA KRL
- Offline programming:
- RoboDK, Siemens Process Simulate
- Scripting in Robot-Specific Languages:
- ABB RAPID, FANUC KAREL, KUKA KRL, Robot-specific IDEs provided by manufacturers
- General-Purpose Programming Languages:
- Python, C++, or Java, often interfaced with the robot’s API or SDK, ROS (Robot Operating System), OpenRAVE, manufacturer-provided APIs
- Trajectory Planning Algorithms:
- ROS with MoveIt!, custom algorithms implemented in Python/C++
- Vision-Based Programming:
- Vision systems (e.g., OpenCV, Cognex), integrated with robotic programming environments
- Artificial Intelligence and Machine Learning:
- Machine learning frameworks (e.g., TensorFlow, PyTorch), ROS, custom AI models
Useful links:
https://library.e.abb.com/public/b227fcd260204c4dbeb8a58f8002fe64/Rapid_instructions.pdfhttps://library.e.abb.com/public/c351e246eeb20a19c12570b90039d5dc/RobotWare%20data%20sheet.pdf
https://new.abb.com/products/robotics/downloads
https://www.kuka.com/en-de/services/service_robots-and-machines/installation-start-up-and-programming-of-robots/application-and-robot-programming
https://opencv.org
https://www.osrobotics.org/osr/installation/motion_planning.html: SmartSort Week 2 Rapport
Sergi
We continued our brainstorming of ideas for our project. We had 3 main ideas. A table tennis machine to play with it when you don’t have anyone to play with or if you want to practice. Here there is a draft that I did of the idea:
Another idea was a robot that moves as a car and has the smart part of being able to move without hitting any obstacles. The final idea was a sorting robot for collecting garbage and being able to distinguish different colors or materials.


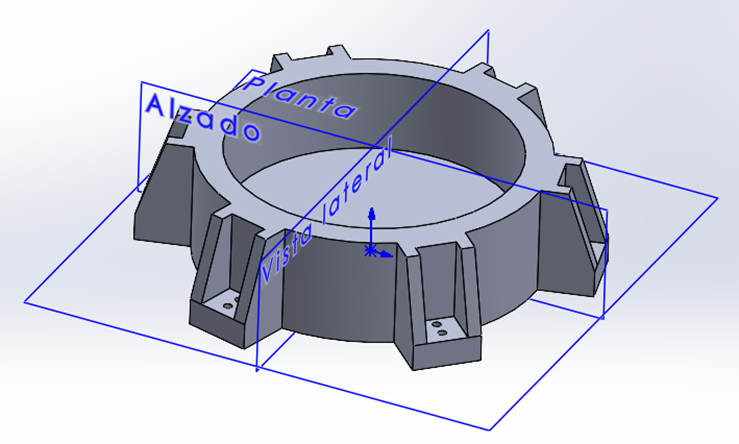
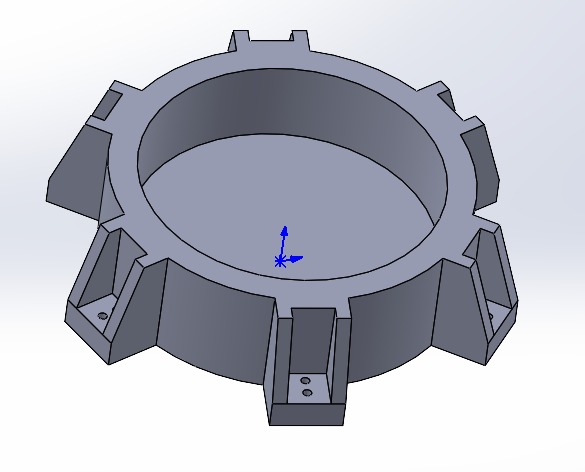
Once we decided that we were doing the sorting robotic arm, Pamela and I met to start the design of the robotic arm with SolidWorks program. The fotos of what we did are in Pamela’s part. We were inspired in the following photo to do the base:
