
Ilir Bylykbashi
Summary:
This week, our primary focus has been troubleshooting the robot due to numerous errors with the motor driver. Initially, it appeared that the motor driver in use was faulty, prompting us to replace it with a new one. However, even after the replacement, we encountered the same issues, posing a significant challenge.
In the project’s early stages, we utilized a slower motor driver, and transitioning to a new one caused complications with the motors. One motor functioned correctly, while the other could only move forward and not backward. However, the new motors were much faster which was why we decided to keep with the new motor and try to work through the struggle.
To address this issue, we decided to revisit the fundamentals and initiated a new project to test the robot using simple code for forward and backward movements. Despite persistent challenges, we eventually succeeded in getting both motors to operate in sync and collaborate effectively with the implemented sensor.
Since we have had this issue, we tried to also work simultaneously and try to get forward with the project, so we directed attention towards refining radio communication and successfully enhanced its efficiency with the other microbit in use.
In the upcoming week, our sole focus will be on resolving this motor-related issue and reclaiming the lost time caused by this bug. John and I will focus on the sensors and how to manage more signals simultaneously, gathering information from the sides and the front.
Here is our current code for the motor driver:
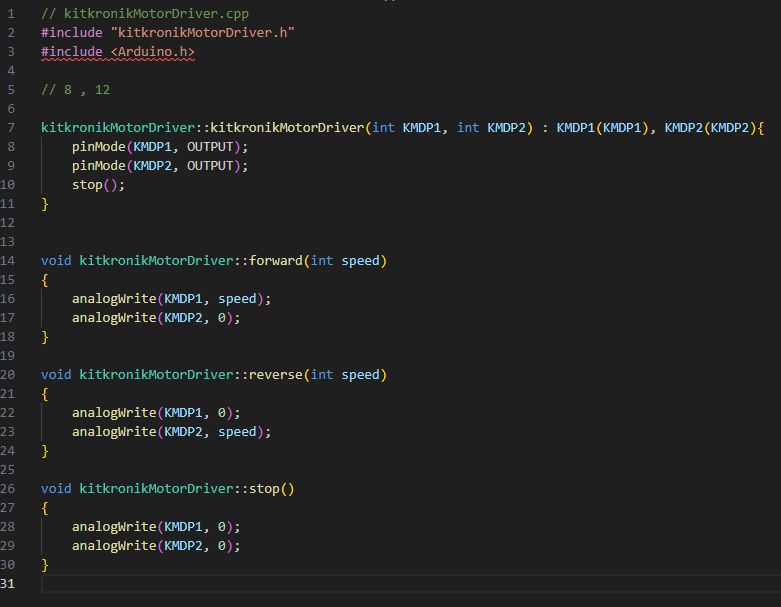
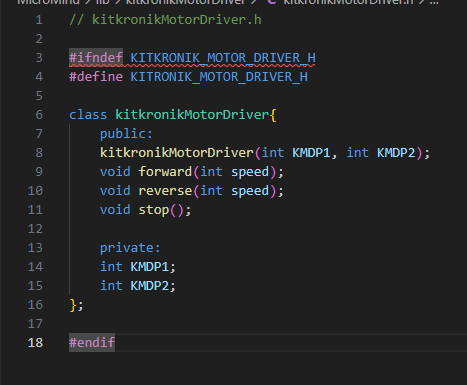
Currently, the motor driver code seems to be functioning adequately for our needs. Initially, when encountering issues, our approach was to write a simple code to isolate the problem. We experimented with running motor1 and motor2 using combinations of high/low settings, but encountered difficulties achieving bidirectional movement for both motors.
Oddly, motor1 would only operate in one direction or come to a halt, regardless of the settings we applied to P8 and P12 using analog and digital writes. As a somewhat spontaneous experiment, we uploaded the entire code, including all the drivers, and surprisingly, both motors exhibited the expected behavior.
John Frederick Lærum
Summary:
This week we have been working on setting up the IR sensor front and rear on the robot. Current setup does not easily allow us to have sensors in any other directions, but the code is created with more sensors in mind so expanding is no issue. Tested and measured the IR transmitter and receiver with several different resistors ranging from 20-10kΩ. 20Ω connected to the IR emitter and 1kΩ resistor connected to the IR receiver seemed to work in order to give us acceptable readings. Once design and more sensors are in place we can extend sensor pins:
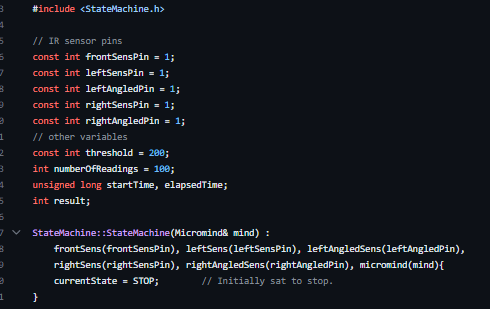
As the wheels currently are blocking us from having sensors placed to get readings left and right we tested the sensor setup with a simple drive forward and backwards depending on these readings. It’s a little limited as we would have had much more flexibility if we were able to sense more of the environment surrounding the robot.
Regardless, without fine tuning the thresholds for readings we at least managed to get movement forward while there’s space in front, and reversing if not until the front sensor has sufficient clearance. You can see this showcased in the video below, you’ll also be able to see why there’s a problem with current design as to having sensors covering the sides.
https://youtube.com/shorts/TfcGptsyt2A
Thomas Frimann
Summary:
(Waiting submission)
Daniels Blomnieks
Summary:
(Waiting submission)