Andreas
This week we made attempts to compete with the bot we have so far though with lacking both good filtering of the sensors and no motor controller other than the most basic “drive forward” function this did not go as well as we wanted.
Despite this feeling of not having done enough, we made promising steps in filtering, meaning by this time next week we will most likely have finished the filters we want and begun implementing them with a motor controller. As for now, we have made a digital filter that will filter the frequencies we want, this has given us the confidence that we could now finalize the process of detection where we can modify it simply by inputting the correct coefficients that will filter what we want, now that we have made it work. The reason for not being finished right now is that we found the current frequency of LED flashing is not good enough, as Dronesonen has background noise at 10 Hz.
Since Marte was sick last week we were not able to discuss how we should proceed with the rotary encodes and this will likely be the theme of my next week, working with Marte to be able to make the rotary encoders work and working with Bendik to create a motor controller that will take in the sensor data and enable consistent movement.
Bendik
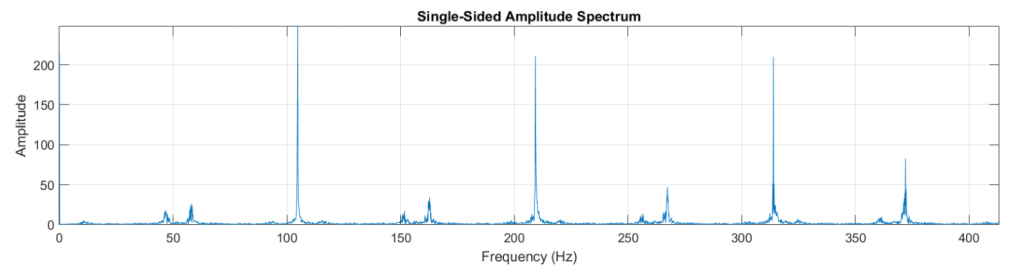
This week on Monday was the day of the drag race, where our micromouse didn’t really compete as we haven’t been able to implement functionality for following a straight path using the IR sensors on the sides of the mouse yet. Me and Andreas worked on this the little time we had before the drag race, although it sadly wasn’t enough. As the IR signals still weren’t filtered properly we were still getting noisy and differing signals form the different sensors. This is what we continued work on after the drag race, and we finally found a formula that worked to filter out noise from the environment. This was a 4th order butterworth filter. Andreas plugged the sample frequency, as well as the IR led blink frequency into MatLab and got the coefficients we needed, and the result was quite good.
This coming week we will finish the by deciding on a faster sample frequency and IR frequency, so that we can alternate quickly between the sensors on the side of the mouse, and front, and get the correct values in a timely manner. We will also be looking into motors encoders, and a motor controller.
Marte
Unfortunately, due to illness I have not been able to work with the project this week.
The plan for the upcoming week is to team up with Andreas to design the motor encoders.
Vendel
After the drag race, we got some more data on how exactly the track is going to be, and while it spelled disaster for the drag race as we got caught on every corner post and veered straight into the walls, it should work out nicely for the final task. The corner posts are pronounced enough that they should be fairly easy to detect using our IR sensors, making counting our place in the maze easier, aiding in orientation, compared to if the corner posts were flush with the walls. With that in mind, I noted eight different configurations of walls compared to the mouse, and we should be able to detect them with a decent degree of confidence once we get the sensors to work smoothly.
These configurations are:
- Channel, a cell with walls on both sides, but open at the front
- Open left/right/both, a cell with walls missing on either or both sides, also open at the front
- Turn left/right, a cell that is blocked at the front but allows turning left or right through open sides
- T-junction, like a turn, but open both ways
- Dead end, a channel, but blocked at the end! Oh no!
Maybe these classifications do nothing to aid the mouse, but my hope is that it will help us in testing what it can see and react to in the maze, as it needs to know if there are openings and if so, where they are.
Astute readers might notice that none of these orientations are blocked at the back. That has the simple explanation that any cell that can be reached will be reached from the “back”. If the mouse turns around to change the layout, that will happen after mapping where the walls are, and so mapping the back walls won’t matter. This is not the Backrooms.