
Summary:
Ilir Bylykbashi
This week took a unique turn as we kicked things off with a drag race at the beginning of the week. This event provided us with the opportunity to assess our robot’s speed and its capacity to maintain a consistent forward motion. However, we encountered a minor setback when one of the motor drivers’ inputs restricted us to using only one wheel. To overcome this challenge, we connected both inputs to a single connection, enabling us to drive the robot forward with the same signal coming from the opposite wheel.
When race day arrived, our solution proved successful, and we clinched the 1st place in the competition! This was the combination of our efforts, where the robot was optimized for maximum speed and the sensors were not accounted for.

Here’s the video from the latest race, which was a drag race between the first and second-place competitors: https://youtu.be/UF1Uh44B9sc
A current challenge we’re facing is the continued malfunction of one of the motor ports. It’s preventing us from achieving bidirectional wheel movement, so we need to troubleshoot and resolve this issue before we can proceed with integrating the algorithm and sensors.
Our project relies on radio communication to activate the robot with a “GO” signal. However, we’re currently experiencing minor glitches in this system, resulting in an unstable connection and time out issues. Some adjustments are needed to address these issues, and will be focused more on the upcoming week.
John Frederick Lærum
This week I’ve been focusing on getting several IR sensors up and running and to test this, we did already have one working from before which was set up by our former electrical student. The already working one have a different value range than the ones provided in the course. I am no expert, but when testing and with different resistances there’s a big difference in the range. The ones provided we currently seem to get values ranging from 10-11 up to about 20, while the one we’ve used up till this point seem to range from 1-1023. I need to test this a bit more, because im not really confident that the ones provided should only range from ~10-20.
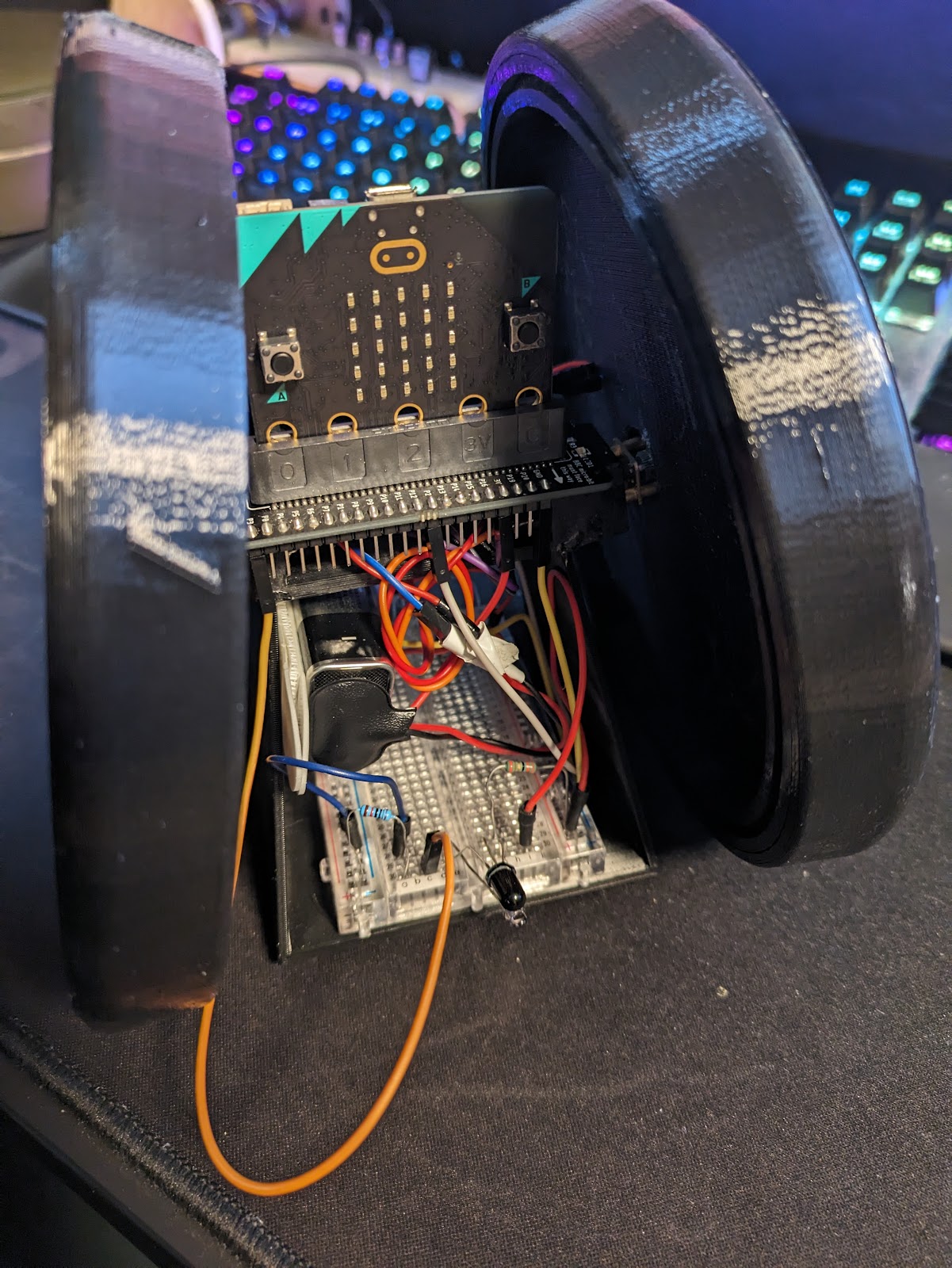
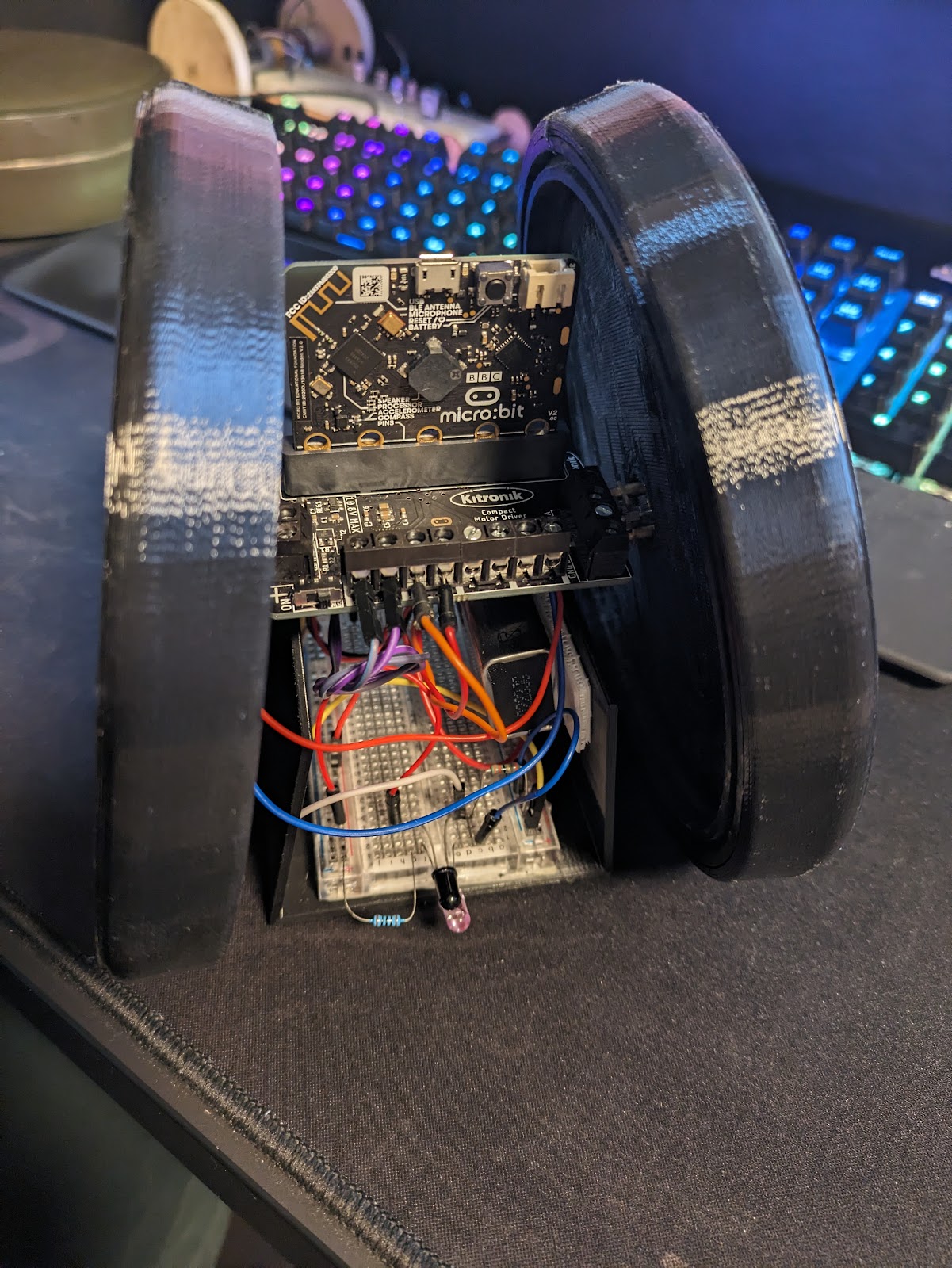
Picture of current wiring, left picture is with the new IR emitter and receiver on the right on we see the sensor set and there’s a slight visible difference on the IR emitter bulb size.
Will have to work further on this to get more stable readings, we also have some bugs that need to be sorted as mentioned by Ilir. We’re only getting both drive directions on one of the two motor ports currently as well as improving on the radio communication.
Thomas Frimann
Summary:
(Waiting submission)
Daniels Blomnieks
Summary:
(Waiting submission)