Summary:
Ilir Bylykbashi
This week John and I decided to establish a plan B in case it is not possible to create a functional algorithm for the micro-mouse project. We want to be able to drive the mouse with another micro:bit. We are now in the stage of establishing it to work correctly, and this is how we want it to function.
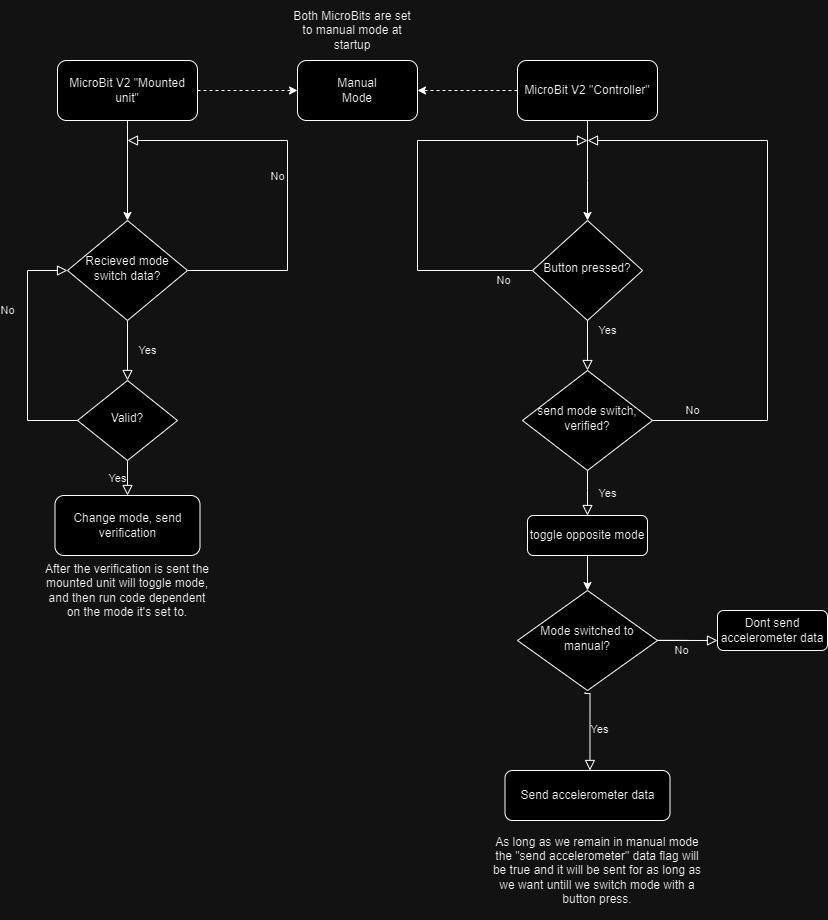
The microbit will have manual mode enabled initially. On the chart we are able to distinguish between both micro:bit v2, and can see their operation.
For instance, the mounted unit will check if there is any data to receive, and will see if it is valid when it is received. If the data is not valid, it will continue operating in its current state. Otherwise, it will change modes and send a verification to the other microbit controller.
Additionally, the remote controller which is connected to the computer, will await instructions based on whether or not button ‘A’ is pressed. Moreover, we have implemented a debounce delay on button ‘A’. This has been done to prevent a single press being read multiple times, and acts as a small filter to prevent noise on the microcontroller being read
As we can see from the video from John, we can see the mode from the Matrix display on both units. This will change accordingly when the modes are changed and confirmed.
Here is a flowchart showcasing our point.
John Frederick Lærum
This week I’ve been working on the radio communication between two MicroBits V2. Both MicroBits are set in manual mode in the setup, but as the A button is pressed on the controller we want to send data to change mode and receive confirmation back. Both MicroBits also display an ‘A’ or ‘M’ on the led matrix to represent which mode we’re currently in.
The idea is to use flags to confirm whether or not we should send/process accelerometer data from the controller. So if i we set the MicroBits in manual mode we can then continuously while those flags are checked send data and have that control the movement of the mouse. Currently we’re not there yet, but we’re getting closer. As for now both MicroBits fire up in the correct mode and once we press the button on the controller it will change mode on the other.
However we’re in need of getting the confirmation sorted out. We’re able to swap from the initial manual mode to auto get confirmation, and back to manual, but then we’re running into problems as we dont get the confirmation this time. Short demonstration of current progress: https://youtube.com/shorts/hWX5HVNx3qs
Thomas Frimann
Summary:
(Waiting submission)
Daniels Blomnieks
Summary:
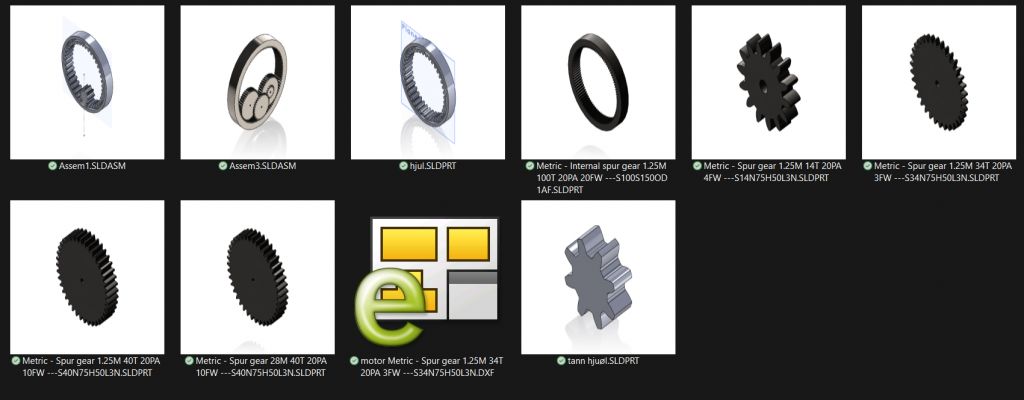
Laser cut test gears to test meshing and size requiared for the wheels.
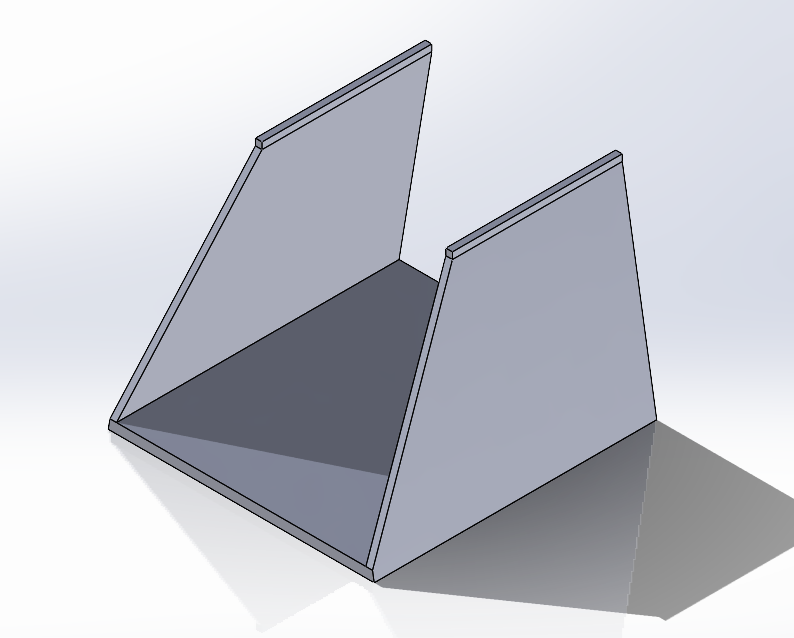
Got 3d ptinted prototype frame and wheels.