Group weekly reports
Ilir Bylykbashi
Summary:

This week has been more demanding than the previous weeks as it is very close to the first presentation and since i have been appointed the group leader i have had to set some deadlines in when things should be due. I also have also stiched up the reports together and worked a lot with the powerpoint presentation.
As part of the software development with John, we have focused on getting the sensors to work together with motors. We have managed to create software that alters the motor speed, so it is giving the same power to each motor, and that it stops, and reverses based on the criteria that we have set for the sensor. We have also gotten out of the Unity simulation that we wanted to create, and instead used a simulation that is possible to get on the internet called the MMS Simulation.
This simulation gives us some walls and cells to get through where we implement a code for the algorithm to make the mouse move through it. Here is the maze that is provided, and we also get a simple program to run the basics of the program, to visually illustrate how the mouse goes through the course. By using these codes, we have managed to make an example algorithm that gives us the possibility to go through a course, however, it is not functional in the way that we want yet so it needs to be worked with even more.
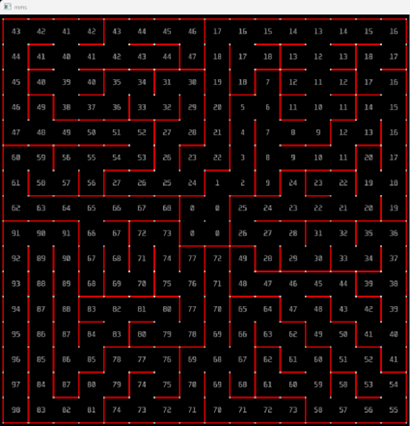
Simulation maze in order to see how the mouse would function in a similar scenario.
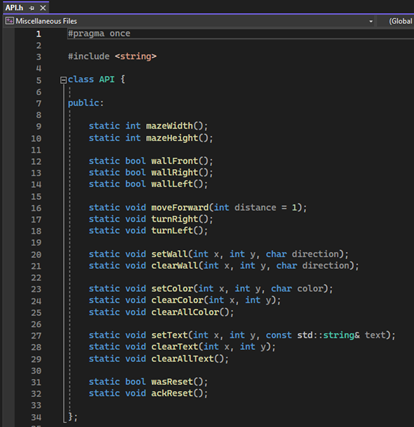
Code to get the mouse movement in the MMS simulation
As we just switched over to this code, we have not fully implemented the correct code but currently the result we get is as follows. The mouse goes through all the cells and then finds the fastest way back. The green cells are the ones that it went through first, then the red ones are the ones which it goes through on the end run to find the fastest way to the middle.
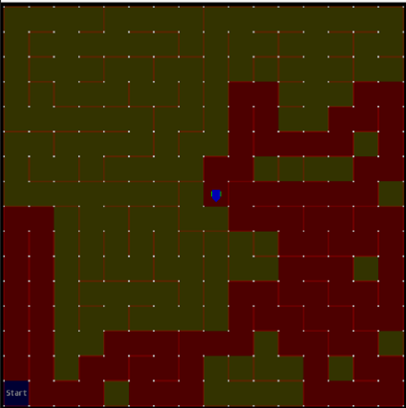
Illustration on how the maze is after a run
We have also put together some of the components so we can try to see the functionality of the robot and how our code would work.
Video of how our sensor and motor are working with the code that we have set it. The motors have also been calibrated correctly so the wheels will move at the same speed even though you give the wheels more power.
Additionally, we also have more code to show which John and I have created together. This will be shown from his example.
John Frederick Lærum
Summary:
This week started off by continuing from last week working on the code for the Micro:bit V2. With the help of Steven on Monday and debugging with the oscilloscope we finally got on the right path as to controlling the motors. So this week the main focus has been on improving the code as to make the motors drive, sense and switch states accordingly. The code i am referring to can be found on our Github in the MicroMind folder: https://github.com/Joffeey/MicroMind_Autonomous/tree/main/MicroMind
I have also been looking at how many readings we could and should do. It takes almost no time to do a single reading, but the value will fluctuate. Tested with different amounts of readings before doing an average and found the value to be much more stable that way.
Example from the StateMachine.cpp

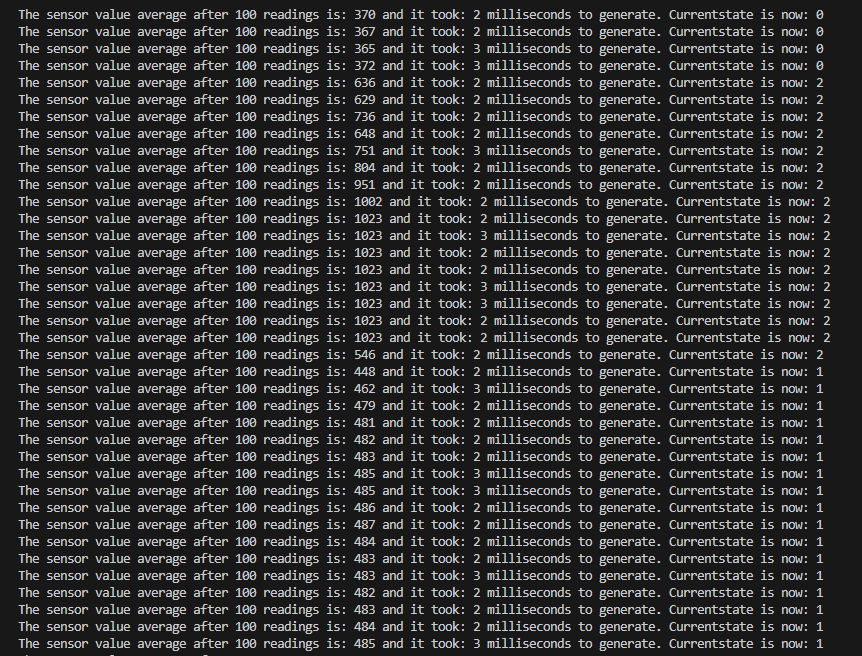
Here’s an example of the output from the terminal where we can see the time it took for 100 readings and the average value while I was moving my hand closer and further away from the sensor. Also added some prints to see which state we are currently in for debugging.
Once we drove both motors and we tested and had verified, we started to assemble a simple prototype with the platform and wheels Thomas and Daniels made. Which resulted in the prototype displayed in the video that Ilir posted.
Sadly for now the motors don’t have enough torque to drive when placed on a surface, but the wheels spin as expected in the different states if we hold it up. Once we power the motors correctly we will have a more complete prototype to show off.
Sigurd Sætherø Spangelo
Waiting submission
Summary:
Thomas Frimann
Waiting submission
Summary:
Daniels Blomnieks
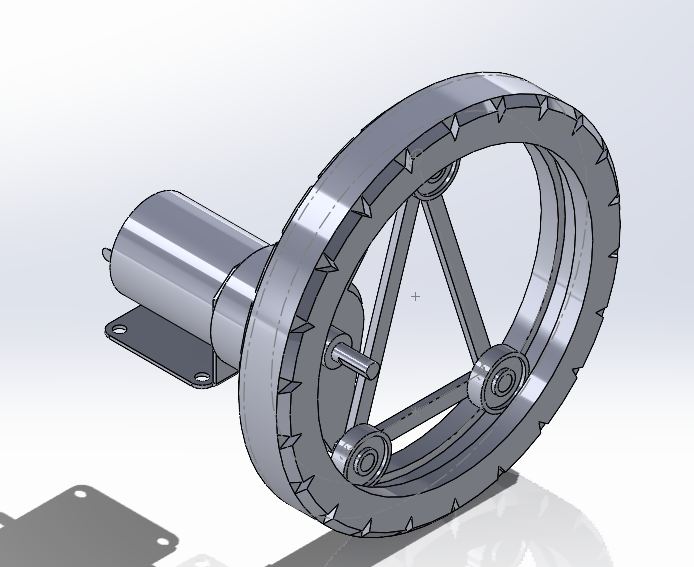
Redesigned the driving wheels a little bit. we still aren’t completely sure how we want to make the tracks. We thought of a different frame design and a shell that goes around the mouse.
Waiting submission
Summary: