This week has been short-staffed for us, as two of our members have been sick for most of it. Despite this, we have made organisational progress and project progress. In the administrative department, we have switched software for tracking our progress, ensuring no redundant work is done, and all the goals we need to meet will be accomplished. On the progress side, we have accomplished enough to make a minimum viable product in the coming week. After that, we can begin working on the second and third iterations.
Andreas
This week was an unproductive week as I have been sick for most of it and had much to do in other subjects because of the sickness. Despite this, we have laid the groundwork for a minimal viable product we can assemble hopefully next week.
On the more concrete side, this week, we have found multiple sources of failure in the IR depth sensors and assembled a prototype with which we can perform tests with. We have also made plans for the board layout and the assembly of the bot.
Next week will hopefully be spent assembling the bot and ensuring that all the components and sensors work as intended. If this work is finished within a short time frame, I can begin designing a motor drive circuit and begin implementation of all components into OrCAD so that, in time, we can make a clean PCB for the bot.
Bendik
This week I have gotten a deeper understanding of the IR sensors. I was successfully able to test out an IR depth sensor, using a simple IR Led emitter, and an IR receiver. I wired to IR LED emitter to the 3V pin on the Micro:Bit, over a resistance. I was able to get the sensor working, by connecting the transmitter and receiver to a breadboard beside each other:
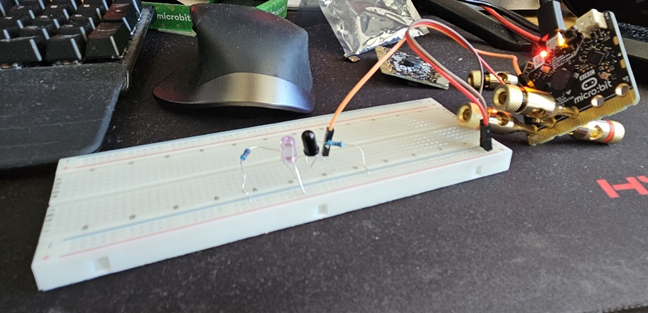
Here you can see the breadboard with the sensor parts connected to the Micro:Bit using banana plugs.
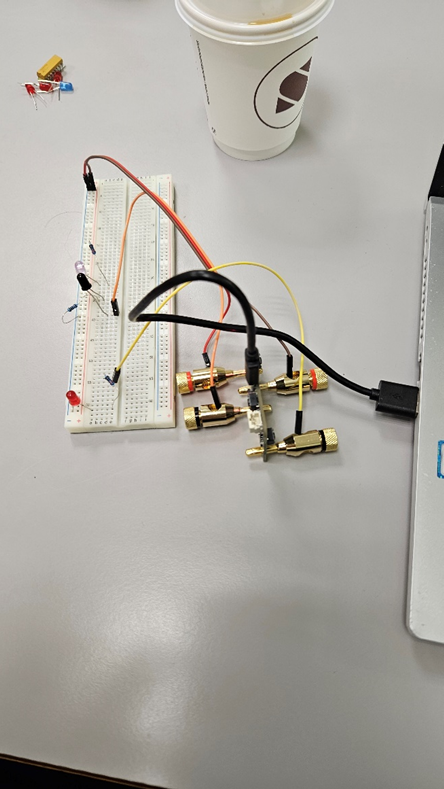
I got the sensor working, I was receiving analog values from the receiver, but the more IR signals that were directed into the receiver, the lower analog value that was received. This didn’t exactly make sense, as the analog value received is supposed to represent the measured voltage level received, and the way the IR receiver works, the voltage should actually increase when more IR light is directed towards it. After having a talk with Andreas, we fixed the circuit and we are now receiving the correct values. This is how the connection looks now:
Next week will be used to figure out how we should place the sensors, how the readings and calculations should be performed to ensure correct operation, as well as looking at the motor connections and control commands.
Marte
This week I have focused on finishing the 3D model of the MVP and get parts. I have also started drafting the design of our test maze.
In the upcoming week I will try to modify/produce parts for the MVP to get it finished that week. I will continue working on the test maze after that.
In the beginning of the week Vendel and I went to the thrift shop to purchase a toy car. Then I proceeded to dismantle it to get parts for our MVP, which was a lot of great fun for only 40 kr! One of the features of the car also gave me an idea for the upcoming drag race – the feature will maybe be revealed later 🤫


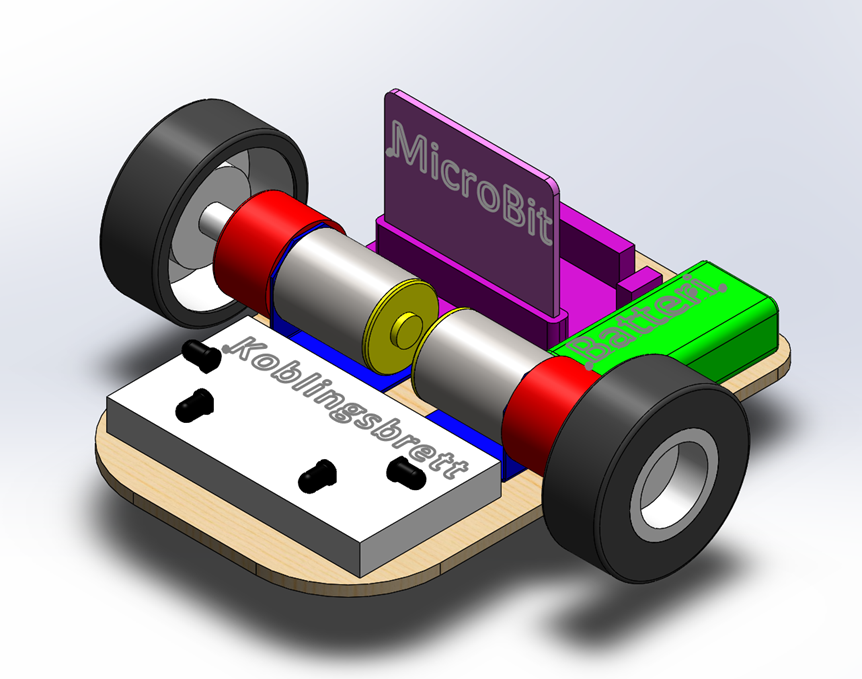
When the wheels got dismantled, I could measure and examine them, and figured these could be used for our MVP. I then 3D modelled them and the most important parts of our MVP was known:
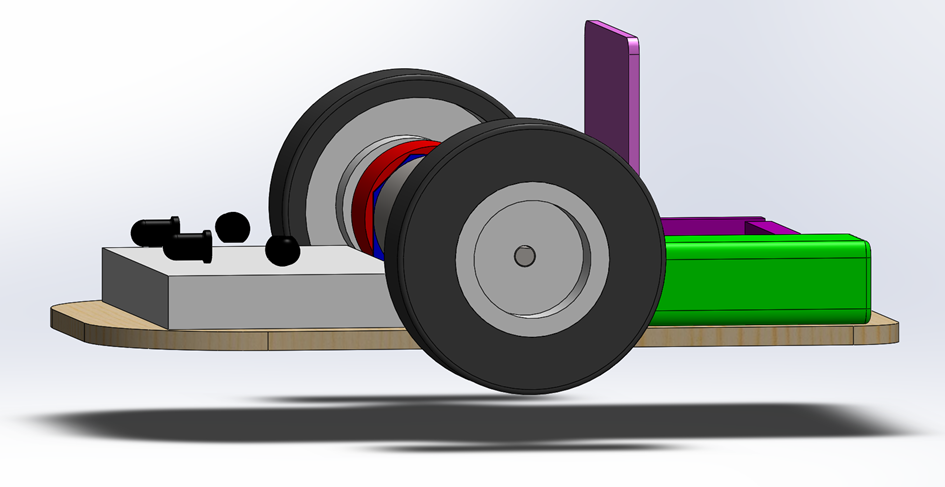
The model seen from the side. In reality it would probably tip in the back since the components in the back are heavier than those in the front. I will take a look at designing a soultion for stability in the upcoming week.
A draft of the test maze. I am thinking of making a 5×5 unit baseplate in plywood, with the possibility of modularity of the design of the maze. The walls will also be made out of plywood, and I am considering if the attachment mechanism should be 3D-printed in PLA.
Vendel
Sickness comes in many forms, but hopefully we are all over the worst of it by now. The monday meeting time was mostly spent doodling about how to proceed and how to get some simple pieces of hardware to start assembling a simple MVP, here defined as a moving bot that can go forwards and not crash into things. Agreeing to get a cheap toy car from the secondhand store, I felt we were getting closer to the goal of having that device up and running.
Reconvening with the team on Friday, it’s apparent that we are moving ahead nicely despite the better part of the team being reduced, either from sickness, mental health or life getting in the way. My part, apart from trying to tie the team together, has been focusing on the brains of the mouse, with algorithms and simple machine learning, but that has met some hurdles mainly caused by stress and recurring issues. I am expecting to be better prepared and productive next week, as it is becoming increasingly important to give the mouse a brain as we are ironing out the kinks in the IR sensing system and the motor control system.
I can happily report that we have been getting a little bit more annoyed with each other this week, and I hope that means we’re about to get closer knit as we work through it, at least that is how we were taught engineering teams work last semester in Systems Design and Engineering!