Group weekly reports
Progress and Accomplishments:
Ilir Bylykbashi
Monday 28.08.2023
- Successfully installed VS Code and began exploring its functionality.
- Received guidance from Steven, recommending the use of PlatformIO IDE within VS Code.
- Downloaded extensions, PlatformIO IDE to program the board and get the required functionality and feedback.
- Gathered some information on datasheets for project components.
- Initiated research on the IR-sensor setup for the micro mouse.
Tuesday 29.08.2023
- Setup a standard project in VS code.
- Delve deeper into researching the IR-sensor setup.
- Watched instructional videos posted by the lecturer for additional insight:
- Sought assistance and learned how to utilize PlatformIO IDE by watching tutorials on YouTube: (https://www.youtube.com/watch?v=JmvMvIphMnY&ab_channel=DroneBotWorkshop)
Wednesday 30.08.2023
- Created a high-level system design.
- Discussion with the mechanical engineers in the group on how we can create the robot and which physical aspects can be programmed efficiently and what changes might be required to make.
Challenges encountered this week:
- Identifying the correct program for coding.
- Learning how to use the program and customize the code for our specific needs.
- Discovering the necessary libraries to facilitate coding.
- Finding out something that works for the whole group.
Summary Ilir:
This week, we set up our development environment, addressed coding challenges with guidance, and laid the groundwork for our micro mouse project. Next week, we focus on IR-sensor programming, motor research, and system design. We’ve configured VS Code and identified essential components for a strong start.
————————————————————————————————————————————————————————————
Thomas Frimann
Tuesday 29.08.23:
- Created a list of points for various parts.
- Compiled instructions on how to perform parts design.
- Initiated an overview of required calculations.
Wednesday 30.08.23:
- Conducted a meeting with the group.
- Inquired about RPM data and options for speed/rev registration on gears.
- Requested information regarding the sensitivity of the Electronic Control Unit (ECU).
Summary Thomas
During these two days, on Tuesday, the team compiled a list of parts, created design instructions, and initiated calculations for the project. On Wednesday, a group meeting was conducted to inquire about RPM data and speed/rev registration options for gears while also requesting information regarding ECU sensitivity. These efforts aimed to lay the groundwork for a successful project.
————————————————————————————————————————————————————————————
John Frederick Lærum
Monday 28.08
We had our second lecture and was given some hardware that would we would use for our project. Started off by getting to know some of the components we had access to and found the datasheets for them online.
Tuesday 29.08
Installed PlatformIO in VS code as this IDE have a lot of the functionality that the Arduino IDE have but it also enables us to program a lot of different microchips including the Micro:Bit V2 that we are aiming to use for our project.
I went through this video for an introduction to PlatformIO https://www.youtube.com/watch?v=JmvMvIphMnY&list=WL&index=1&t=2233s
Briefly looked into how the IR sensors work and how to connect them on the breadboard for testing purposes.
Wednesday 30.08
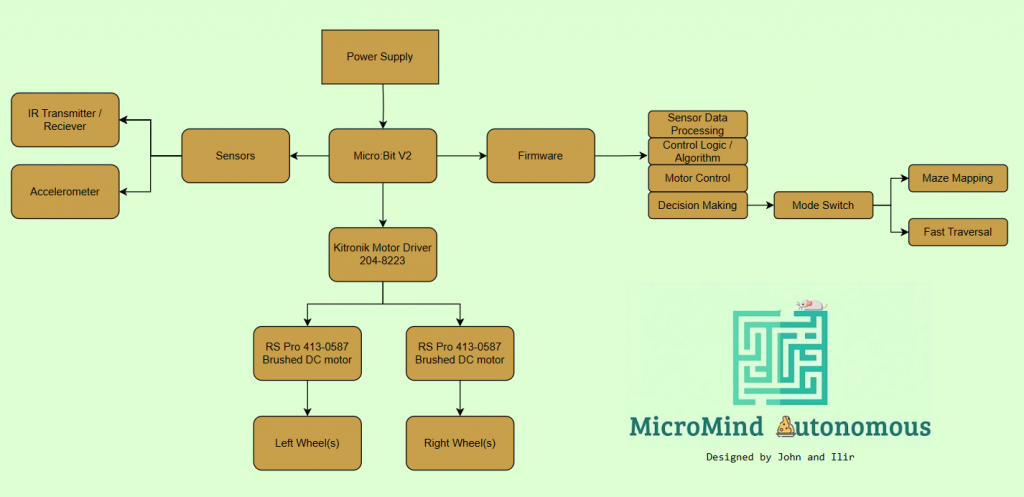
Designed the first iteration of the high-level design in Draw.IO together with Ilir.
Gathered information of the components we received on Monday:
RS Pro 413-0587 Brushed DC geared Motor: https://docs.rs-online.com/9b93/A700000007082077.pdf
Kitkronik Motor Driver Board: https://docs.rs-online.com/772e/A700000007103880.pdf
IR Emitter: https://no.rs-online.com/web/p/ir-leds/8023307?gb=b
IR Phototransistor: https://no.rs-online.com/web/p/phototransistors/6655397?gb=s
Micro:Bit V2: https://tech.microbit.org/hardware/
Summary John
There’s a lot of new components to dive into and considerations we have to do. From some of the resources online I saw examples of projects where they used encoders to measure distance the mouse traveled. I am not sure if we need this, the Micro:bit V2 also have quite a lot of onboard sensor might be that we could use some of these instead.
High level design this week:
Daniels Blomnieks
Tuesday 29.08.2023
- Debated about the placement of controllers and the design with Thomas Frimann
- We came up with two concepts.
- Talked about what wheels/drive train we want.
Wednesday 30.08.2023
- Talked about concepts of the design wit the whole group.
- Made some sketches of the design.
- Talked about gear ratio of the motor and size.
- Talked about use of hall sensor to get a read out of the RPM of the driving wheels