Hei igjen bloggen! 
Ny uke, nye muligheter! ![]()
Fra og med nå så kommer oppdateringer individuelt fra medlemmene. ![]()
Mats Andre Syvertsen
- Begynne å sette opp repo med byggesystem (CMake vs/og PlatformIO)
- PlatformIO blir veldig knotete å få target for desktop tilhørende simulator, native target er restriktiv og å hente inn eksterne biblioteker er mer krevende enn f.eks. CMake.
- CODAL (Offisiell Micro:Bit v2 runtime) vs arduino-nRF5 core (PlatformIO bruker arduino-nRF5)
- Komme opp med arkitektur (start)
- Core – Kjernebibliotek (Datastrukturer + Algoritmer)
- Firmware – (MicroBit spesifikk kode, styring, sensor osv.)
- Simulator – Testing av datastrukturer og algoritmer i Core evt. remote debugging
- Stepping med å se data fra algoritmen
Jonathan
- Installert clean Virtual Machine med Ubuntu 22 for å bruke til utviklingsmiljø.
- Klonet git-repoet og laget SSH-keypair for å autentisere mot git
- Skapt en Platform.io-prosjektmappe som potensielt kan brukes.
– Note: For å få installert platform.io trengte jeg en python-pakke installert ved:sudo apt-get install python3-venv. - Tegnet et diagram over logiske software-komponenter vi ser for oss å trenge:
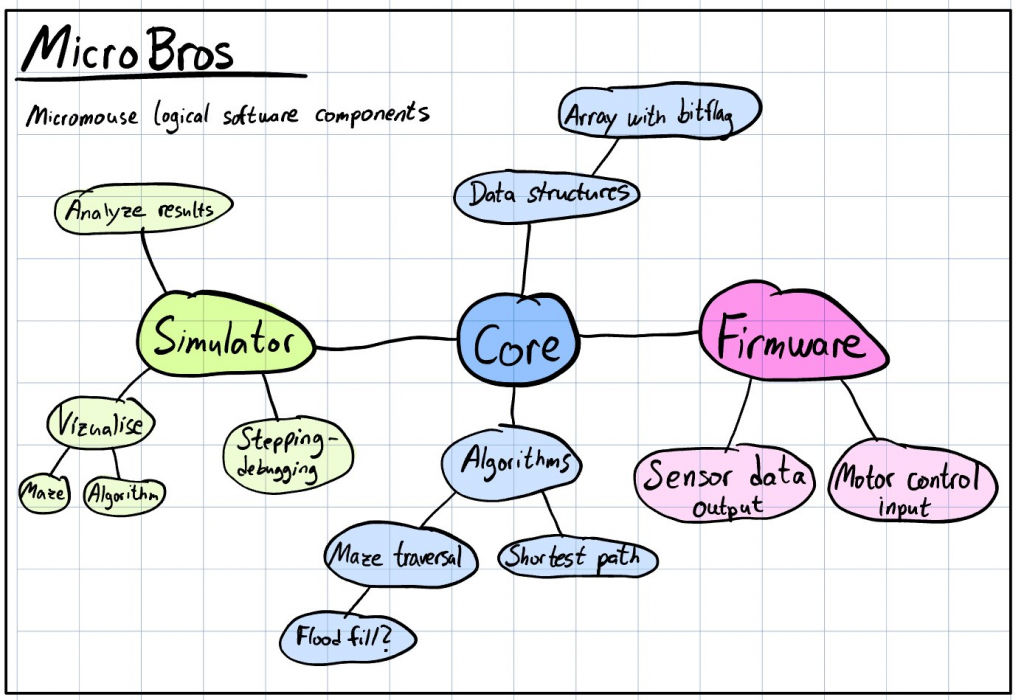
Noen detaljer om software-komponentene:
- Array with bitflag:
– Dette er en datastruktur hvor et array representerer hele labyrinten. Hvert element i arrayet skal bestå av bitflags, som er en datatype hvor vi lagrer boolske verdier som beskriver hvor mange vegger (1) eller åpninger (0) som fins i et gitt punkt. Dette skal ta minst mulig lagrings- og beregningstid på enheten vår. - Stepping-debugging:
– Dette er en feature i simulatoren vår hvor vi ønsker å kunne debugge koden for hver iterasjon den tar, per sensordata som er hentet inn. - Algorithms:
– Vi trenger gode algoritmer for å kartlegge labyrinten, identifisere målet, og for å finneste korteste vei til målet. Disse algoritmene kan ligge i Core-komponenten som kan aksesseres fra både Firmware og Simulator.
Cezar Antonio Avadanei
Startet dagen litt tregt. Vi samla oss som gruppe til slutt. Her noen punkter som har skjedd i dag.
- Git hub forelesningen.
- Klonet git-repo til MicroBros.
- Satte opp PlatformIO i vsCode for arduino.
- Arkitektur for MicroBros logical software komponenter.
- Bestemte å bruke ferdig lagd bil, dette gjorde vi på grunn at vi er nå alle i gruppa fra data.
- Prata om mulige endringer for den ferdiglagde bilen med tanke på sensorer.
Agenda til week 3
- Følge timeplanen
- Strukturere videre på mappene til MicroBros.
Iver Enget Nesbø
- Jeg har satt opp platformIO på min maskin. Det var Mats og Jonathan som først undersøkte dette.
- Jeg har gått gjennom endringer på prosjektet om potensielle endringer på bilen med de andre. Samt snakket med Steven om hvilke alternativer vi har og hvor realistitsk det er for oss å ta på oss maskin ingeniørens rolle selv.
- Anskaffet ferdigbygd bil.
Mulige endringer på bilen vi ønsker å gjøre
- Legge inn tre infrarød sensorer (en på front og en på hver side) i i stedet for ultralydsensor i front.
- Bilen kom med en del skruer løse og manglende muttere, så vi må gå gjennom den for å passe på at alt sitter som det skal.
- Sette på en bryter slik at bilen får strøm når en knapp eller bryter blir skrudd på. Dette blir for å slippe å ta batterier ut og inn ved bruk.
- Vi vurderer å bytte til vanlige hjul for å se om det øker hastigheten på bilen.
Annet
Sondre måtte dessverre forlate gruppen denne uken, og vi er derfor 4 medlemmer igjen med kun datastudenter.
Elsker dere
One response to “MicroBros-Group2 (Week 2)”
Elsker dere også!