The components are now assembled on a wooden plate “simulating” a drone or other devices that the tracking camera may be attached to.
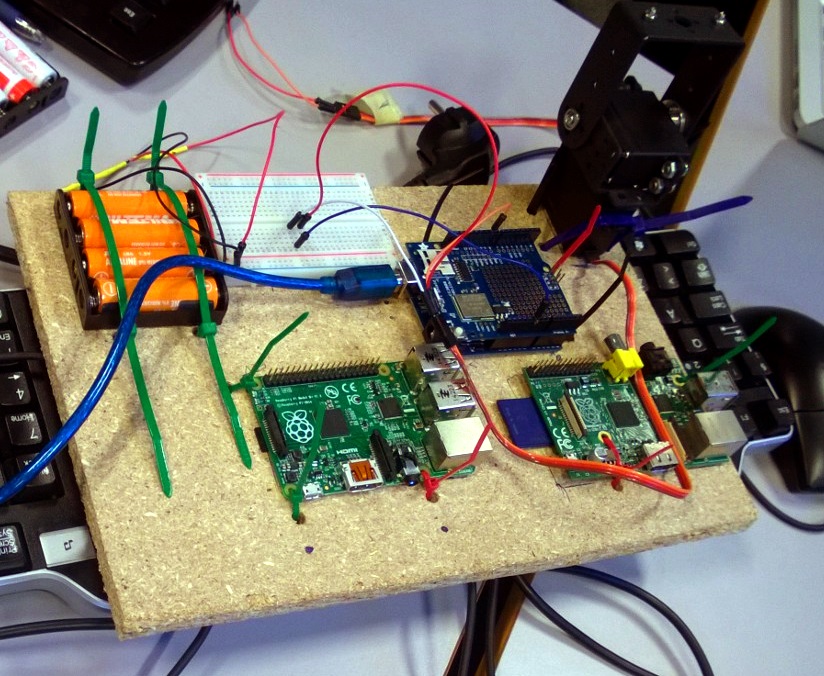
The system consists of a battery bank, 2 Raspberry Pi’s for network communication and handling camera input, as well as one Arduino for controlling the two servos in which the camera is attached to.
The prototype product is nearly complete. All that remains is fine-tuning the code and do some final tests.