This is our second week of the project. after we had classified all of the required requirements. We took one step further and started disassembling some of the inner parts of the RC car. so that we can determine which parts are working well and which are not. then we started by disconnecting the jumper wires one by one carefully so that some of the parts do not be damaged down the line.
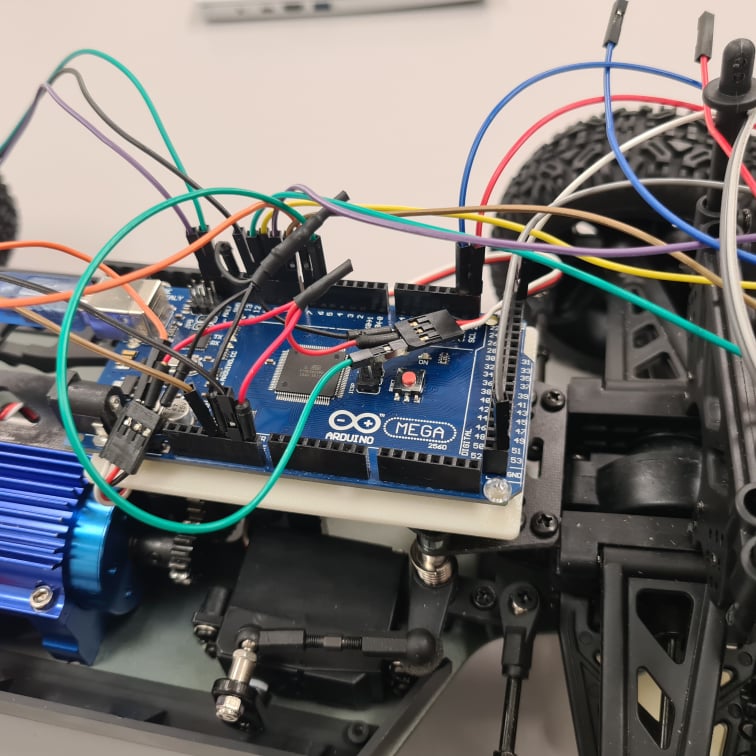
we began with ultrasonic sensor testing, since it is one of the fundamentals of obstacle avoidance. we had andre who was responsible for the structure. his side was make a design and connect together ultrasonic and servo motor to the Arduino microcontroller. for the particular moment we were testing the parts separately to make it easy for ourselves to dive more deeply.
As i and Jonas were busy on figuring out the various angles the servo motor can move. Andre finished connecting the wires to the Arduino microcontroller. we wanted to test it. the ultrasonic sensor was working well. but servo motor was not cooperating along with the sensor. we had a problem there and we were trying to figure out what caused the problem. later on we see servo motor was damaged, that’s why is was not functioning properly. all of us, we started to unscrew the servo motor, put in another one there.
the other servo motor worked well. Jonas and i were making angles test, so that servo motor do not beyond the limit we had some problem to start with. we did some measurements from the servos, we were going to estimate the various degree angles for the left, forward and right. the aim with ultrasonic sensor was to detect the distance between itself and the object in front of it. If an item comes within 20 cm of it. The ultrasonic sensor will make a command to the Arduino microcontroller, which will then send a command to the servo to take turn or take 90 degrees on straight forward.
-next time
Next time we will start on the motor. We couldn’t start it since we didn’t have a power supply for it, and we tried various methods, but it didn’t work because it required special type input cable. The motor will then be tested. André will try to find out more specific of the motor for the rc car. My task will be to move it forward and backward using the joystick. Jonas will work on motor functioning’s craft and speed.