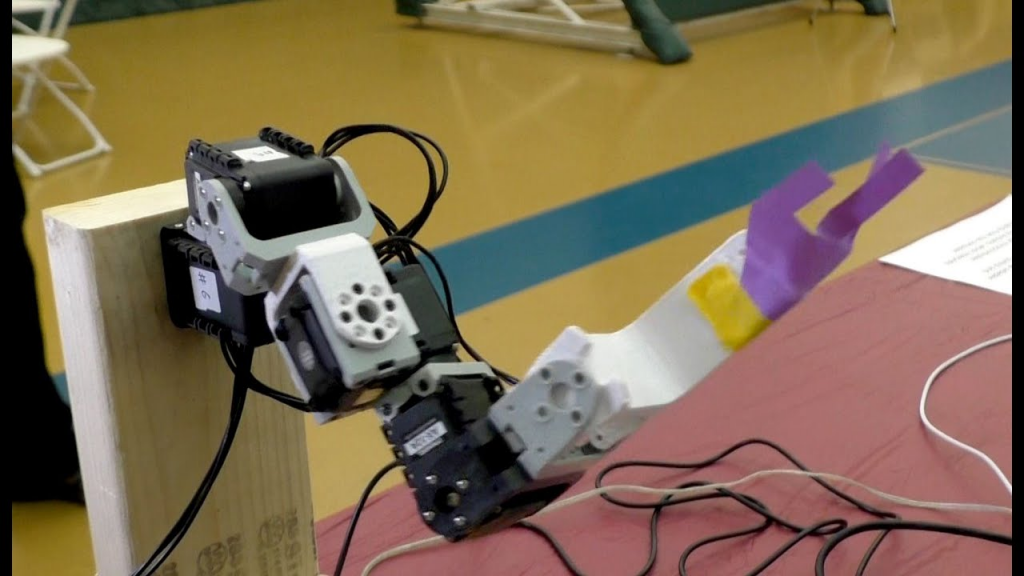
We chose to make a robotic arm that can move and be controlled. We want it to be able to move the pieces in a game of Tick-Tac-Toe.
Group assembled
- Ole Christian Walvatne Kopland – Computer engineering
- Mohamed Mahad Mahamed – Computer engineering
- Fouad Ayman Foad Irkayek – Electrical engineering
- Victor Adrian Köhler – Electrical engineering
- Joakim F. Bomstad – Machine engineering
Requirements
A:
- 3 Axis-arm (angle – phi, height – z, length – l)
- Rotation around z-axis
- Position Variation height and length (servos)
- Function to “grab” stuff
- Low central weight positioning
- Leight weight arm (cnc-/laser-cut carbonfiber(?))
- Manual Control in movement directions + grab
- Positioning
- Play tic-tac-toe manually
B:
- Visual Recognition (Camera feed) with sensors
- Play Tic-Tac-Toe automatically vs a human
C:
- Make it look good
- Play other games-such as chess etc
- Check the score either via an App or a Website (Reset the game and choose who starts the game either randomly or chose by clicking a button)
- Add battery
- Machine vs Machine playmode
- Perhaps start the game using voice recognition using AI