13.11-2013
Gruppemedlemmer: Ståle Rudin, Henrik Berge Sørum og Martin Stenbro
Målet med oppgaven våres er i hovedsak å lage en nettverkstyrt elektrisk bil med direkte videooverføring.
Vi setter muligens på diverse sensorer slik som;
– Lys-sensor (som skal sette på frontlys hvis det blir for mørkt)
– Distanse-sensor (for sikkerhet slik at den ikke kræsjer)
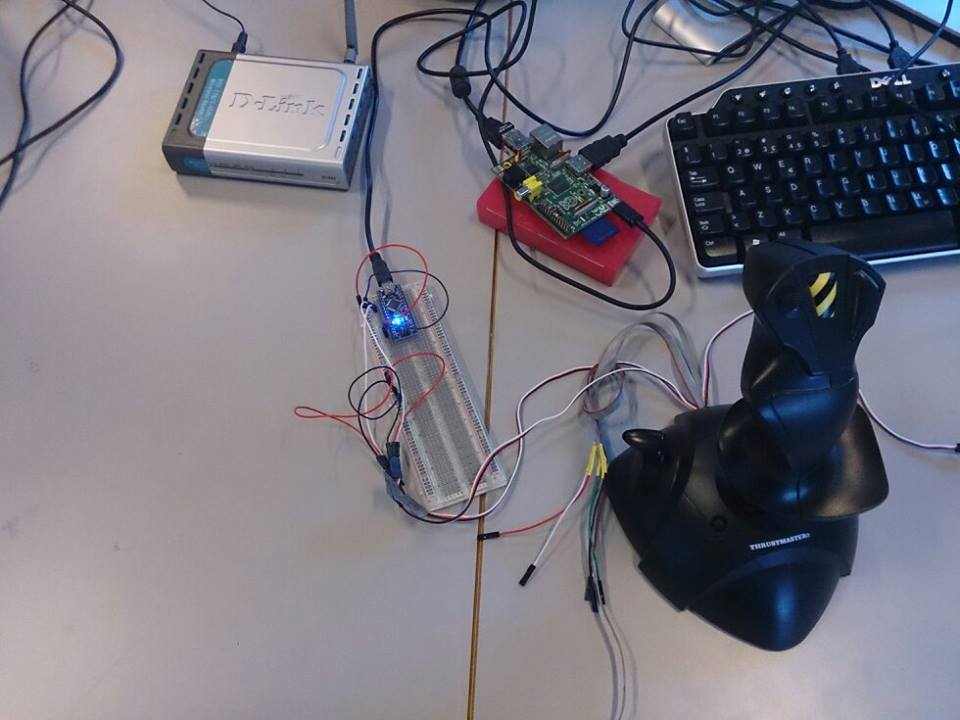
Vi har arbeidet i det siste med å få kontakt mellom komponentene våres. På den ene siden har vi den stillestående stasjonen våres, med en joystick, en arduino, en raspberry pi og en skjerm. I teorien skal arduinoen hente inn analoge verdier fra joystick’en og sende det videre til raspberry pi’en som igjen skal sende verdiene videre over et lokalt nettverk til raspberry pi’en som sitter på bilen.
Når raspberry pi’en på bilen har mottatt verdiene overfører den dem videre til en arduino som også sitter på bilen. Til slutt sender arduinoen disse verdiene videre via digitale utganger med pwm-støtte til motorene på bilen.
Slik vi har valgt å sende signaler for å styre bilen:
Joystick -> analoge innganger -> arduino -> Serial -> raspberry pi -> lokalt nettverk -> raspberry pi -> serial -> arduino -> digitale utganger (pwm) -> motoren
Potensielle problemer:
Et relativt stort problem er overføring over det trådløse nettverket. Når vi testet videooverføringen med nettverks-kabel gitt det relativt feilfritt, men over det trådløse nettverket var det et ganske stort delay på videooverføringen. Det samme gjelder når vi overfører verdiene som skal styre bilen over det trådløse nettverket.