Date: 14.11.2019 – 21.11.2019
The tale of this sprint is one mixed with both tragedy and victory. Tragedy because several components died, yet triumphant as several small goals were achieved.
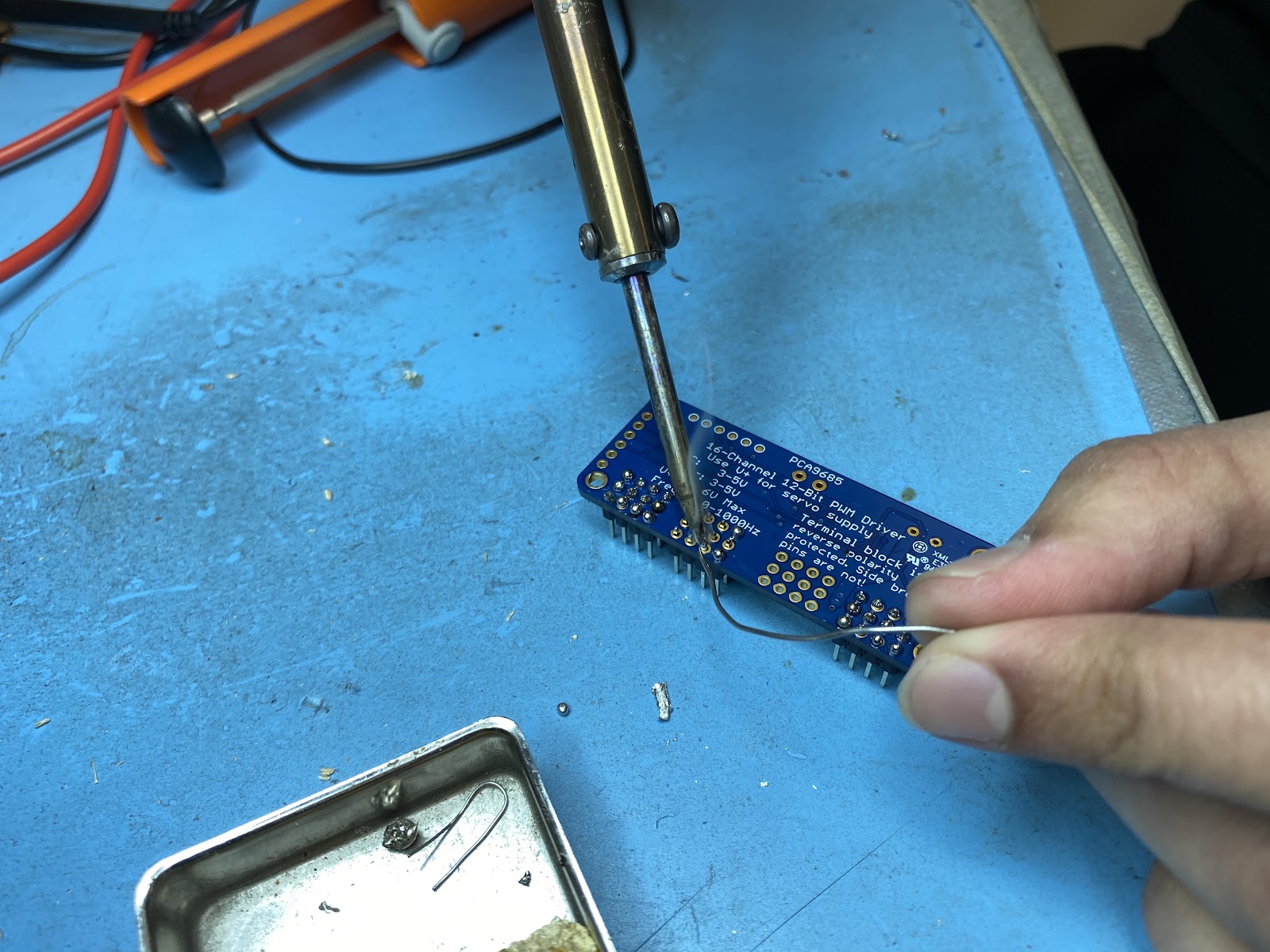
First of all, we got a hold of the PWM board we need to simulate the controller inputs on the flight controller. It involved a bit of soldering connectors to the board, but then it was ready to go. We soldered the pins and verified that it works properly, as this was a relatively easy task to do.
While trying to figure out how to connect it to the Raspberry Pi 3, tragedy struck when we accidentally shorted the 3.3V and 5V rails on the GPIO pins together. This unfortunately killed the board and it would not respond to anything at this point. Luckily we have a Raspberry Pi 4 that we are not using at the moment, and with some luck, we might be able to boot the OS on the Pi 4. If it fails to boot then we will have to try hacking around it, or if that fails, install ROS from source on a fresh install of Raspbian. We talked to Steven and got ahold of a Raspberry Pi 2 for temporary use, but we immediately realized that it’s struggling to run our system.
The victory of this week was that the final iteration of the drone in carbon fiber was fully put together and we were really satisfied with the design. The mechanical focus now will be to hide as many cables as possible and keeping the design as clean as possible. This includes painting visible cables and 3D-printing parts which will hide different parts and cables we want to be hidden.



We also improved the landing gear this week, both in terms of software and hardware. The mechanical part had to be adjusted to achieve a smooth rotation and the software part was adjusted accordingly. Since the landing gear is also a part of our auto-landing sub-system, we implemented an ultrasonic sensor underneath the drone to calculate the distance down to the ground and to signal the drone control unit to raise or release the landing feet upon a given distance. The legs are rotating 90 degrees when the drone reaches a certain height, and this is currently implemented on an Arduino board as our Raspberry Pi is currently dead. We will move the code over to the Pi when that problem is solved – hopefully as soon as possible!
This has generally been a very stressful week, since we have examinations in other subjects that also require our attention. We also went to full panic mode when the Raspberry Pi died, because this board is our main drone control unit and everything else is depending on this single board. We have talked to Steven and we are currently exploring solutions to overcome this problem as soon as possible.