Date: 26.09.2019 – 03.10.2019
We have mostly been working with hardware this week and we got ahold of some necessary components for the drone. We have been testing some of the parts to make sure that they work properly, as we have been playing around with the firmware to test all the capabilities it offers. Ensuring this is very important, because getting ahold of good components can take a lot of time and we cannot risk postponing the development due to insufficient components.
We have not connected these components to the drone yet, so just for testing purposes we used a radio controller and receiver to test the drone motors to ensure that they all work as expected. We have four drone motors from DJI and four corresponding speed controllers (ESC). We did experience some minor problems during the testing, and we realised that we need to supply much more power than originally anticipated. The motors from DJI are quite powerful and we need to use a bigger battery to provide enough power to all of our components, including our single-board computer.


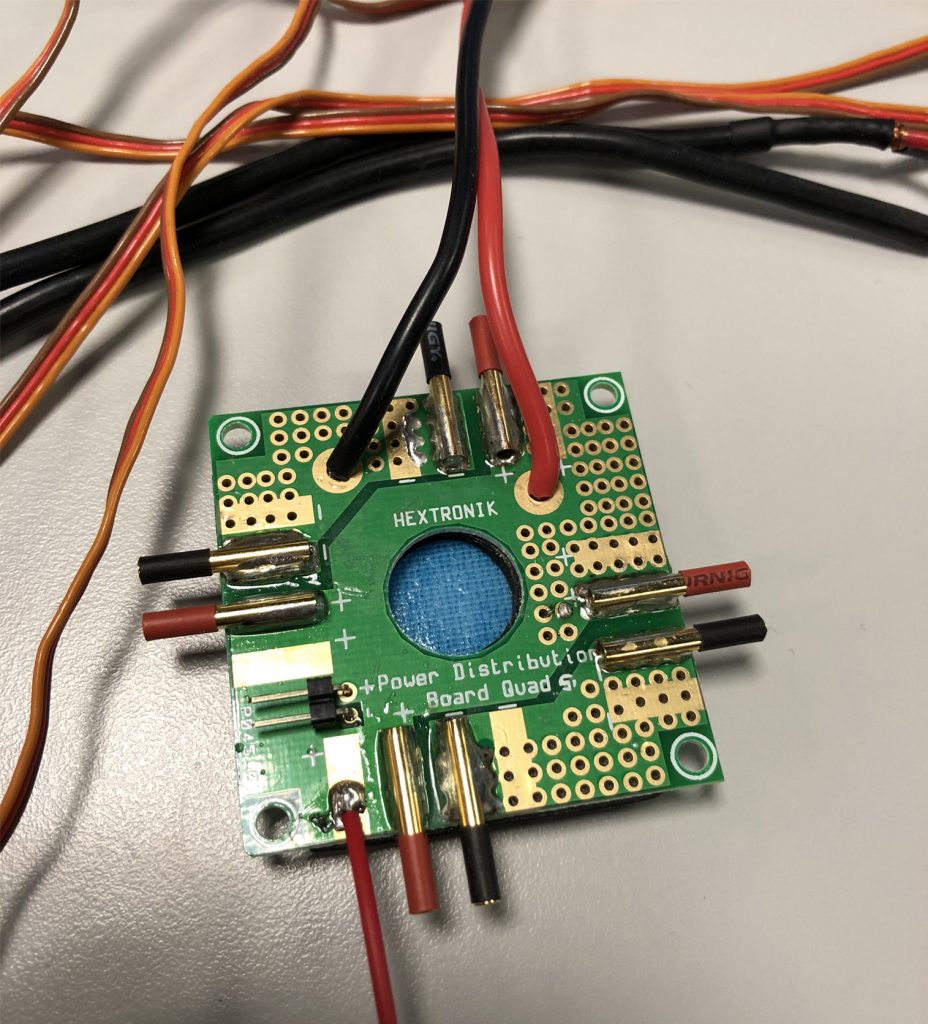
We need to use a Power Distribution Board to be able to provide enough power to all our drone motors, and we are currently figuring out which PDB we need to use to properly distribute power to our drone motors. We are currently working with a PDB by Hextronik, but it might not be good enough to work with four DJI motors. In that case we need to order another PDB that cooperate better with our current components, without needing to worry about power issues and complications in the future. Our goal is to use one large battery that is capable to supply enough power to all our drone components, our servo motors inside the landing gear, and the Jetson Nano as well. The only problem is weight, because powerful batteries are heavy in weight and it will affect the technical budget that we designed last week. We have some leftover weight that we can compensate, but we would rather like to keep the drone lightweight to make it as portable as possible. This is something we will discuss and conclude during the next sprint.
We encountered another problem as well, where the camera suddenly stopped working. The Jetson Nano is unable to read any camera feed, we even tried two different cameras to check whether the problem is camera-related or Jetson Nano related. We are not sure what could have caused this, since the camera worked fine last week.
We had to hack around an issue with ROS, since it uses Python 2.7 and TensorFlow mostly works with Python 3. To solve this matter we had to build the cv_bridge ROS package ourselves for Python 3. We will do some debugging this week to look into this issue, and hopefully have the problem located and solved as soon as possible. It might be a software or some driver issue that refuses the camera connection, or it might be that the Jetson Nano is actually faulty, which is a much bigger problem.
We are getting close to being able to start assembling the actual drone. We had a slight revelation this sprint; we could have used an electrical engineer in our group. Since we figured our project would be light on electronics work, we didn’t need one. It’s clear to us now that having someone focusing on the electronics would have been a good idea, as it takes up a lot of time — we’re running low. We should be able to manage, since the main thing we need to do is to solder the motor power cables to the board, and creating extension cables from the speed controllers to the actual motors. This is something we hopefully can complete during the next sprint.