Date: 29.08.2019 – 05.09.2019
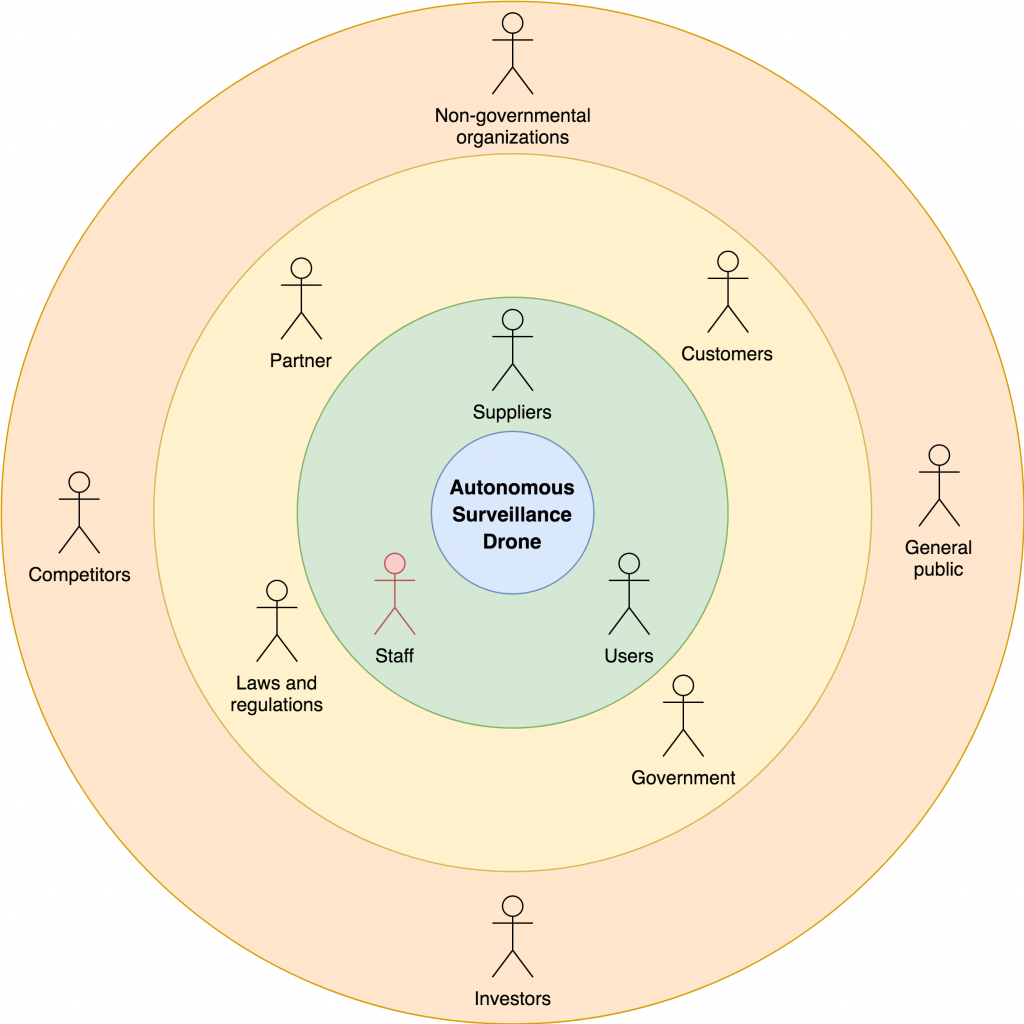
We had multiple group sessions this week, where we continued the planning and development from last week. One of the first things we did during this sprint was to list down all the system requirements, along with determining our stakeholders and their interaction with our system. This is quite important in order to realize the scope of our project and to know which external entities we are dealing with. Since we are building an autonomous surveillance drone which is operated with a camera, we need to conclude the government as a stakeholder as well, due to the fact that there are numerous laws and regulations in place for the usage of private drones, especially during surveillance scenarios.
We have inspected the entire ecosystem of our product and determined multiple stakeholders that interact with our system in one way or another. These stakeholders can be divided into active and passive stakeholders, where an active stakeholder is one that is directly involved in our product development, and a passive stakeholder is one that does not directly participate in product decisions, but still interacts with our product development in a manner that affects our decisions. Some of our active stakeholders are staff members, parts suppliers and the product users. Some of our passive stakeholders are for example the general public or non-governmental organizations.
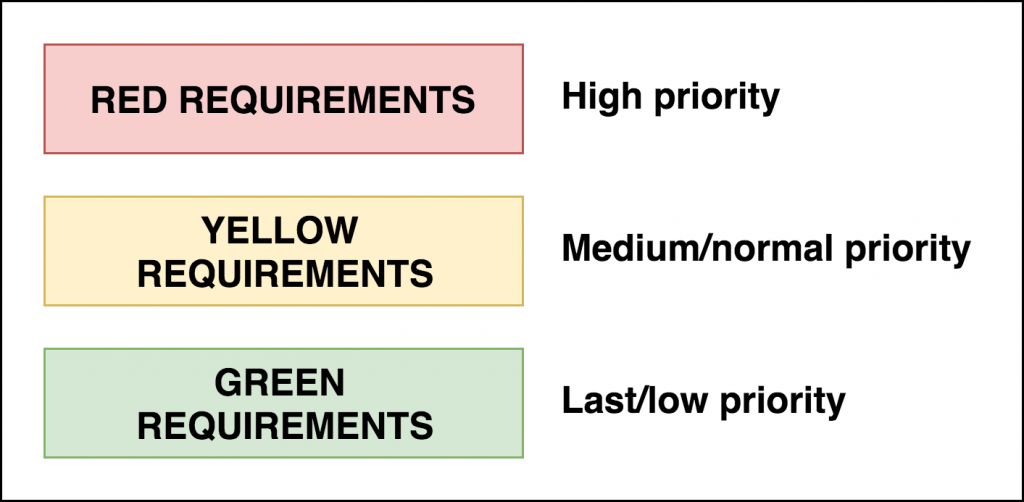
Concluding the stakeholders, we went over to system requirements and made a list based on the priority level of each requirement and its importance to our product life cycle. Since we are building a drone for surveillance purposes, it is reasonable to determine the military as our imaginary customer. We have received some requirements that must be fulfilled in order to satisfy our customer’s needs. The requirements are divided into three priority levels: red, yellow and green, where red is high priority, yellow is normal priority and green is last priority. Our target is to fulfill all requirements from red to green, but the red requirements are crucial in order to successfully proceed throughout the product life cycle.
Customer requirements:
- Red requirements:
- The system must be able to operate safely.
- The system must be operable through manual control.
- The system must be up to date with laws, regulations and standards.
- The system must be able to stabilize itself during flight time.
- The system must be able to communicate with the outside world (IoT).
- Yellow requirements:
- The system must be able to detect objects autonomously.
- The system must be able to report logs to the control center.
- The system must be able to prevent itself from crashing (anti-crash).
- Green requirements:
- The system should be able to detect specific objects given by customer.
- The system should be able to receive commands from the control center.
- The system should be able to send live video feed to the control center.
- The system should be able to map its own movements.
- The system should be able to attach extra modules, such as a softgun.
System requirements:
- Red requirements:
- Proper component surveillance.
- Proper testing and quality control.
- Up to date with laws and regulations.
- Backup-plan in case of connection failure during flight time.
- High quality components and chassis.
- Yellow requirements:
- Replaceable and upgradable parts.
- Time-effective production.
- Easy to disassemble.
- Green requirements:
- Ability to fly in challenging environments, such as rain.
- Always have spare parts in inventory.
- Easy to use and transport.
The requirements might change during the development phase, as we might receive some more requirements from our customer in the future.
After deciding upon the requirements, we went over to the design phase. We had a brainstorming session where we all presented our ideal design for the drone, and we picked the best one. We had to compare the different designs based on stability, airflow and some other terms. We made an initial design sketch in order to illustrate how the drone would look, and to get an idea of things we need to improve in the future.
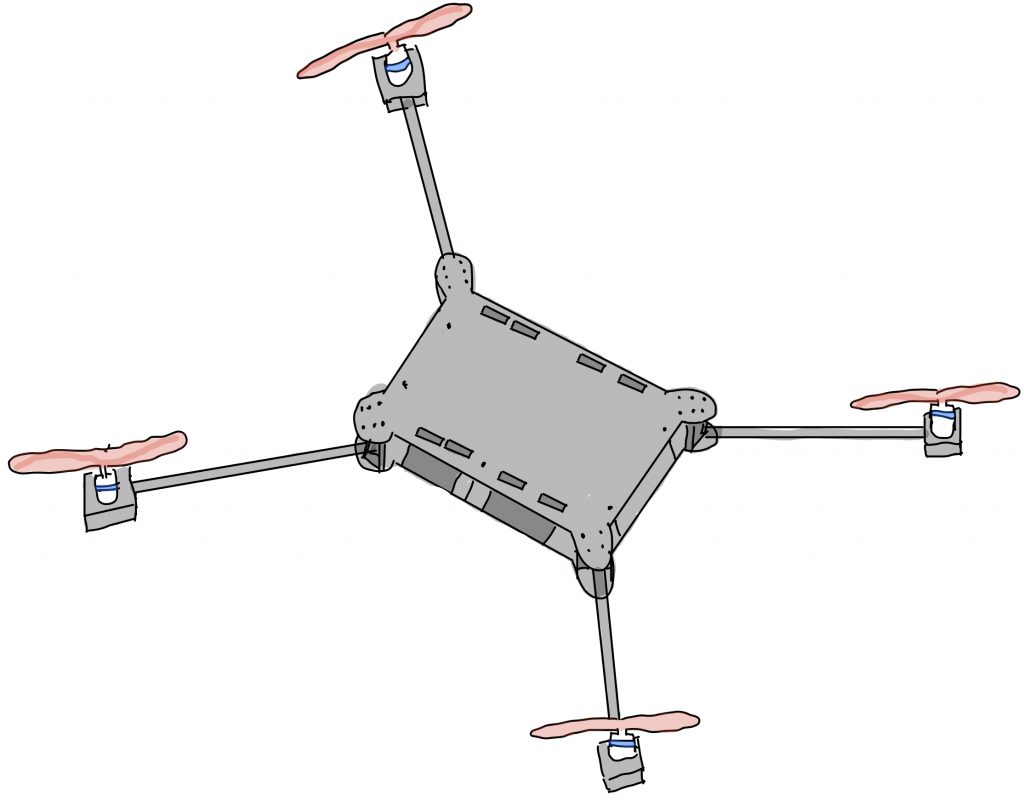
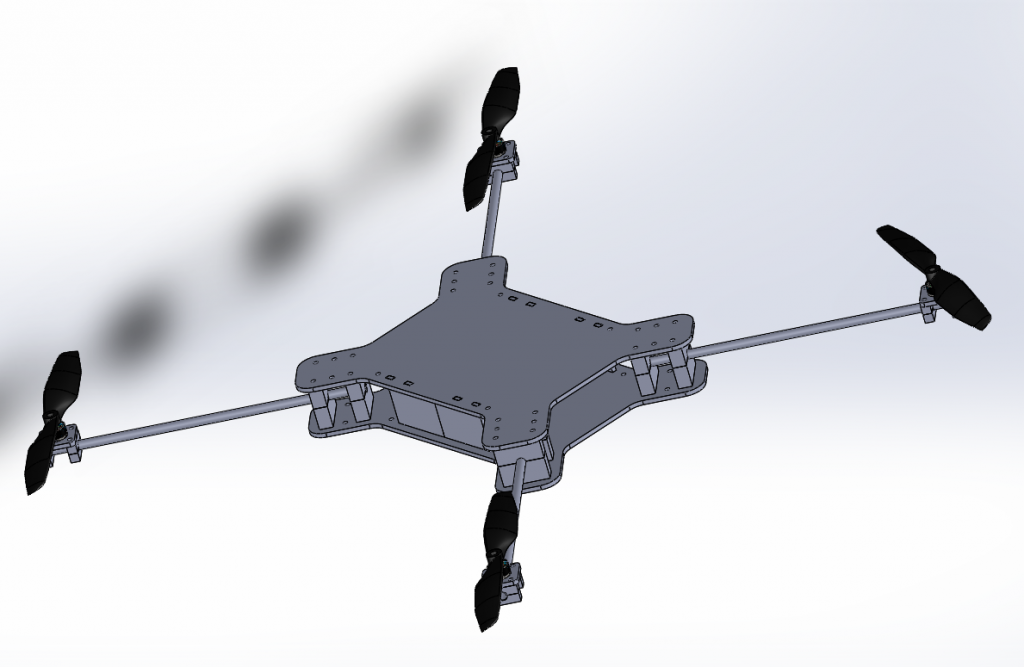
After making the sketch on paper, our mechanical engineers made a simple model on SolidWorks as well, to make a proper demonstration of the first design iteration. We noticed that the 3D-model does not look much like the initial design we did on paper, because the first sketch was missing some important aspects, such as proper airflow, landing feet and some more important criterias. So after having a group meeting, we made some changes to the 3D-model and we improved it by calculating the size of our components and selecting another material for our drone chassis. Please keep in mind that this is just a very light version of the drone, and we will do many more iterations where we change the design during the development phase.
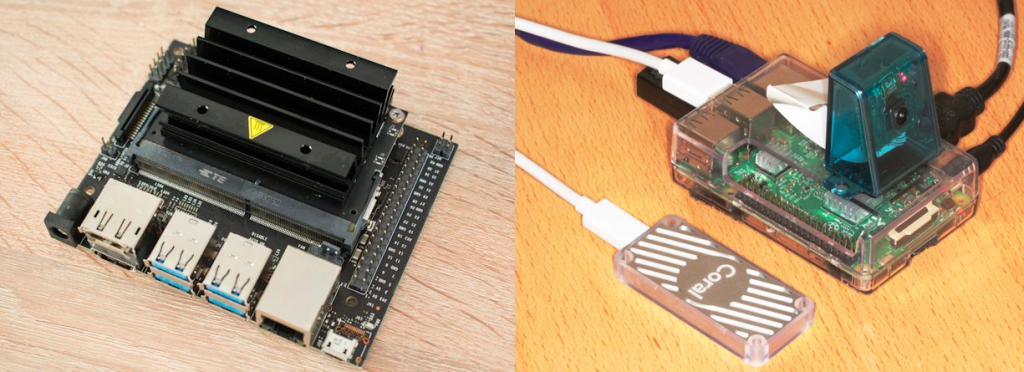
This week we also spent a lot of time researching for components and looking at technical reviews. A drone contains multiple essential components and we are currently looking at different flight controllers that we need to select and compare. We are also looking at different single-board computers that we are considering for the drone. The reason why this requires a long technical process is because we need to ensure that the single-board computer is powerful enough to run all our sub-systems, along with the machine learning and object detection frameworks as well. Especially the image processing requires heavy resources in order to perform a reasonable job with the image tracking and classification. We cannot depend on a Raspberry Pi to do all this work, so we are aiming at something more powerful and expensive. Right now we stand between the Nvidia Jetson Nano and the Google Coral USB accelerator, as both of these are great powerful development boards that we can use for this project. We will discuss and decide this more by the end of next week, as this is something we need to order as soon as possible.
This sprint has been very intensive in terms of research and a lot of technical reviews. Drone components are expensive, so therefore we need to make sure that we order the correct components and we need to make sure that these fit together properly as well. But that being said, we have achieved a lot this week and we are very proud of the development and the workflow within the group.