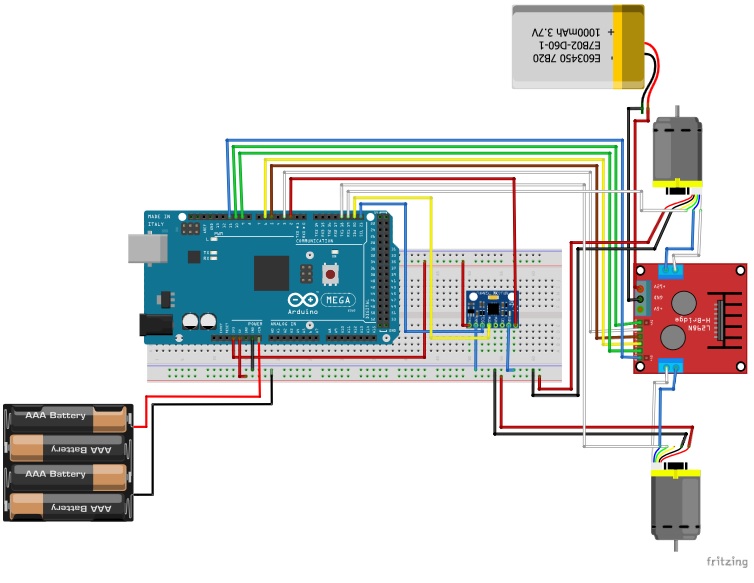
Vi har tegnet kretsen inn i Fritzing på nytt.
Bibliotekene vi har benyttet til koden er open source. De er som følger:
- PID_v1.h
- MPU6050_6Axis_MotionApps20.h
- LMotorController.h
- I2Cdev.h
- Math.h
PID_v1 biblioteket brukes til å regulerer inngang mot utgang. Her setter vi Kp,Ki og Kd etter eget system. Output brukes i sammenheng med motor controller, og er en verdi i mellom -255 og +255 etter hvilken retning motorene skal gå. Denne verdien blir kalkulert igjennom PID kontrolleren i forhold til input. Input startet som bare vinkel, men ved hjelp av komplimentærfilter kombineres akselerasjon og gyro data fra MPU 6050 sensoren.