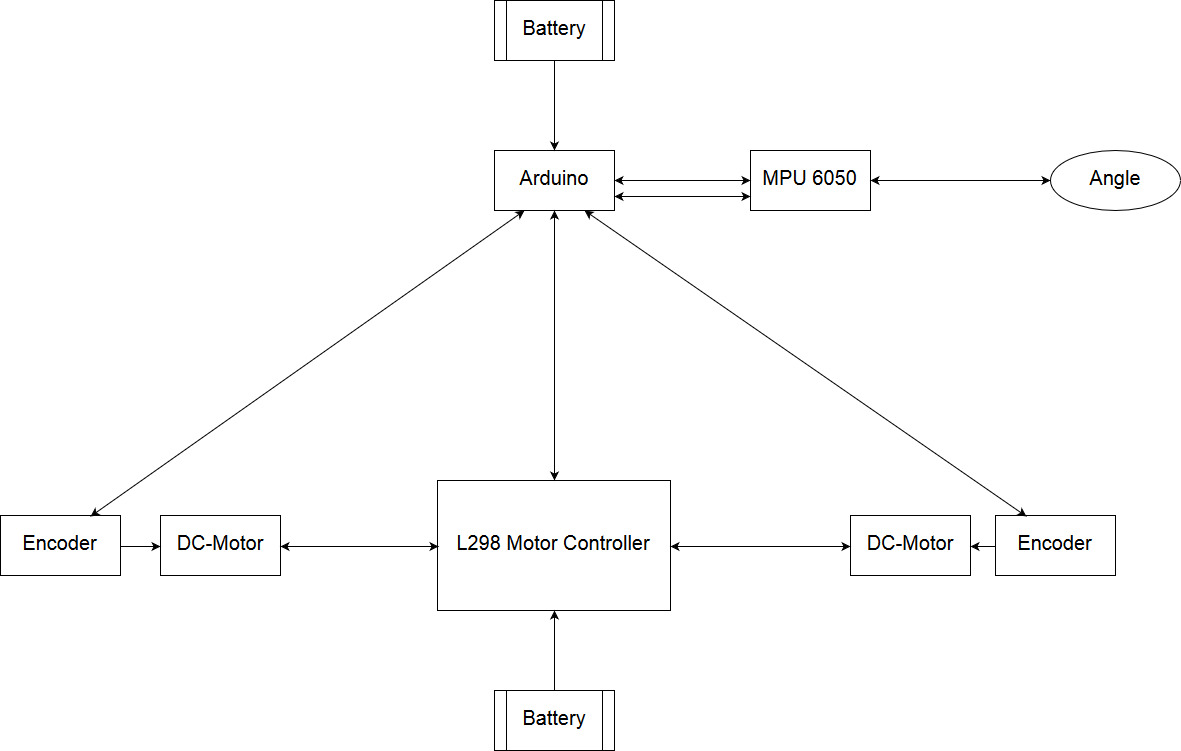
Vi har tegnet et system diagram som viser hvordan systemene inad fungerer med hverandre. Arduinoen kommuniserer kontinuerlig med IMU(MPU6050) og leser av hvilke data gyroen og akselerometeret gir. Like så kommuniserer arduinoen med enkoderene, og ved help av dataen fra enkoderene kombinert med gyro og akselerometeret skal roboten balansere.
Motorene kommuniserer via L298 Motor Controller, som igjen kommuniserer med Arduino via EnA, In1, In2, EnB, In3 og In4.
Denne uken fikk vi byttet ut batteriet til motorene med et større batteri. Arbeidet med koden fortsetter. Det nye batteriet veier mer også, som skal være positivt for systemet.
Enkoderene til motorene måler pulser per omdreining på motoraksling. Vi har fått dem til å teller pulser og hvilken retning akslinene roterer. På grunn av manglende interrupt pins måtte vi bytte fra Arduino Nano til en Arduino Mega. Fortsatt får vi kun lest en av to pulser per hjul, da ble utfordringen å lese ut hvilken retning akslingen roterte. Dette løste vi ved å bruke verdiene fra output som er til motor kontrolleren og lese hvilken retning de roterer.