Vi har valgt en Kp verdi ved å prøve oss frem, og har fått roboten til å prøve å balansere. Den vil ikke holde seg på plass, den kjører av gårde. Vi mistenker at det kommer av mangel på filter. Vi har også kommet frem til at batteriet til motorene ikke er kraftig nok.
Kalman Filter
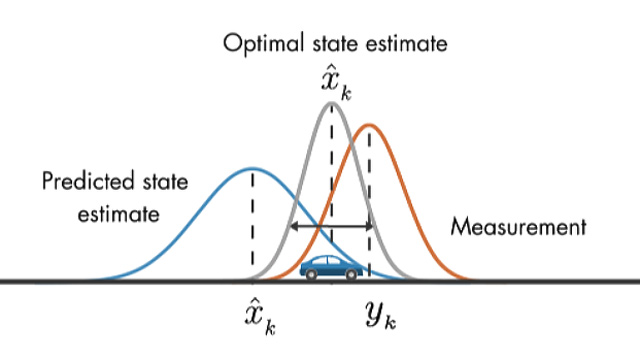
Et Kalman filter fungerer slik at det tar en måling av en valgt variabel, f.eks hastighet, lager et estimat av den valgte målingen, og lager et optimalt variabel estimat. Bildet under illustrerer dette ganske godt.
http://bilgin.esme.org/BitsAndBytes/KalmanFilterforDummies
Denne bloggen gav oss en god forståelse på Kalman filteret.