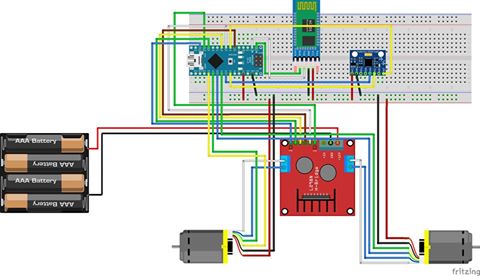
Denne uken fikk vi tegnet inn kretsen i Fritzing, og vi har nå bedre kontroll over koblingene til systemet.
Vi har også funnet riktige offset verdier til MPU 6050:
mpu.setXGyroOffset(44);
mpu.setYGyroOffset(-16);
mpu.setZGyroOffset(-10);
mpu.setZAccelOffset(626);
Dette får oss et steg nærmere for å få roboten til å balansere.