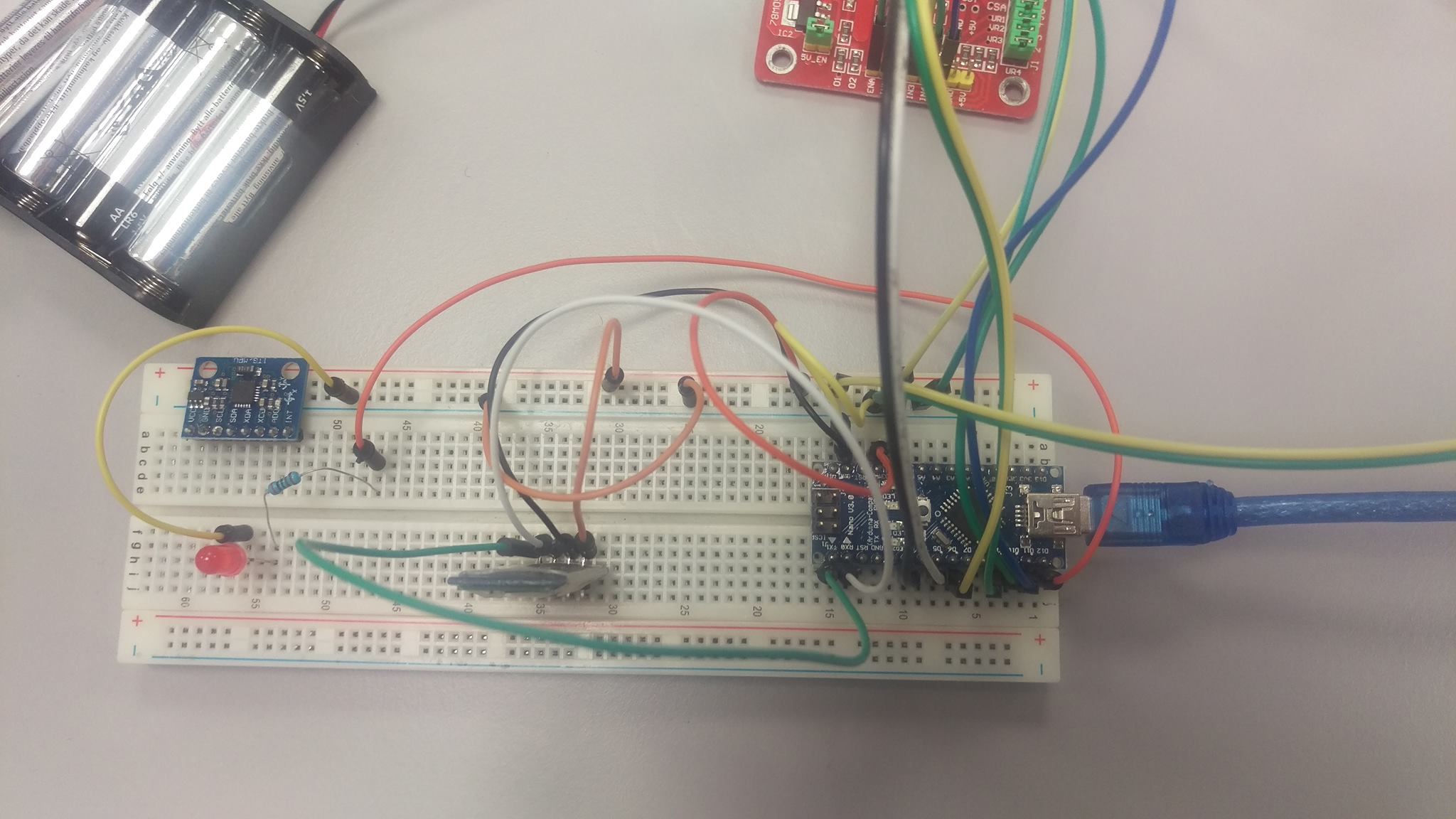
Vi har jobbet videre med koden, men får ikke gjort så mye mer før platene til rammen er printet ut. Vi ser det begynner å bli litt rot med ledningene, så vi planlegger å tegne kretsen i Fritzing for å holde system på hvilke ledninger som går hvor.
 Arbeidet med koden fortsetter. Vi har funnet ut litt mer om hvordan et Kalman filter fungerer, og vi har gjort noen beregninger av PID verdier på papiret.
Arbeidet med koden fortsetter. Vi har funnet ut litt mer om hvordan et Kalman filter fungerer, og vi har gjort noen beregninger av PID verdier på papiret.
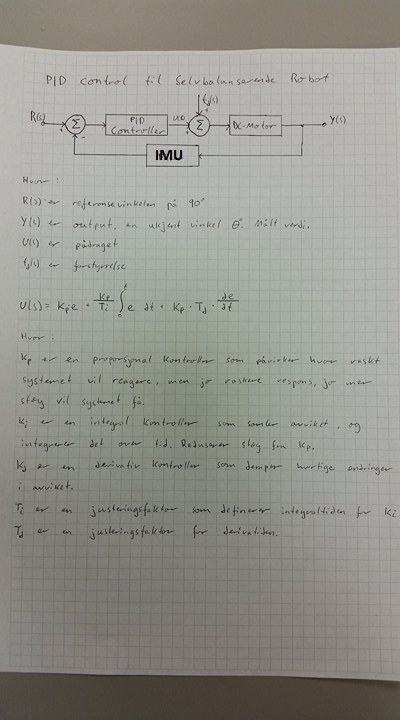
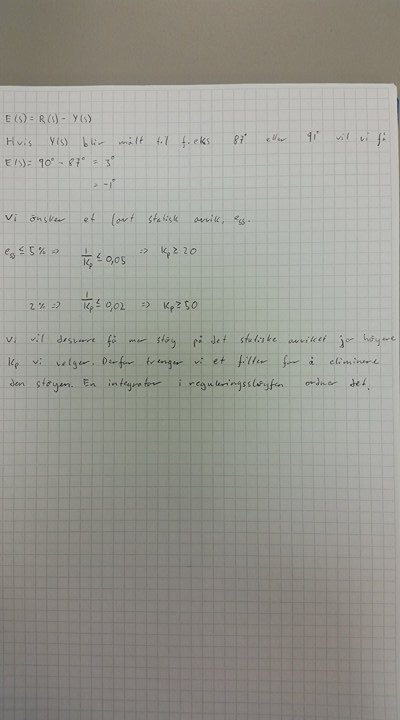
Her har vi beregninger for vinkelen til roboten, tilsvarende må vi ha en PID-loop til for å regulere hastigheten til systemet.