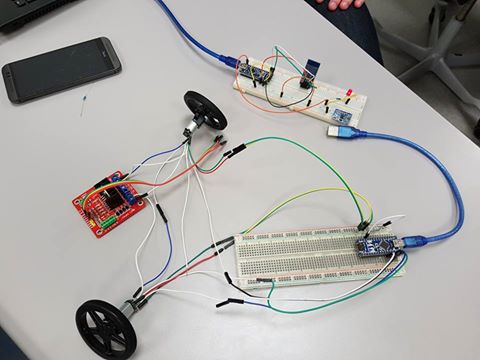
Arbeidet med å modellere platene i Solidworks fortsetter, og vi har startet å teste bluetooth
styringen til motorene. Vi har fått motorene til å gå frem, tilbake, høyre motor alene frem/tilbake og venstre motor alene frem/tilbake.
Utover det har vi funnet ut at vi trenger et Kalman filter og et komplimentært filter implementert for å få et stabilt system med minimalt støy.