7.11.2017
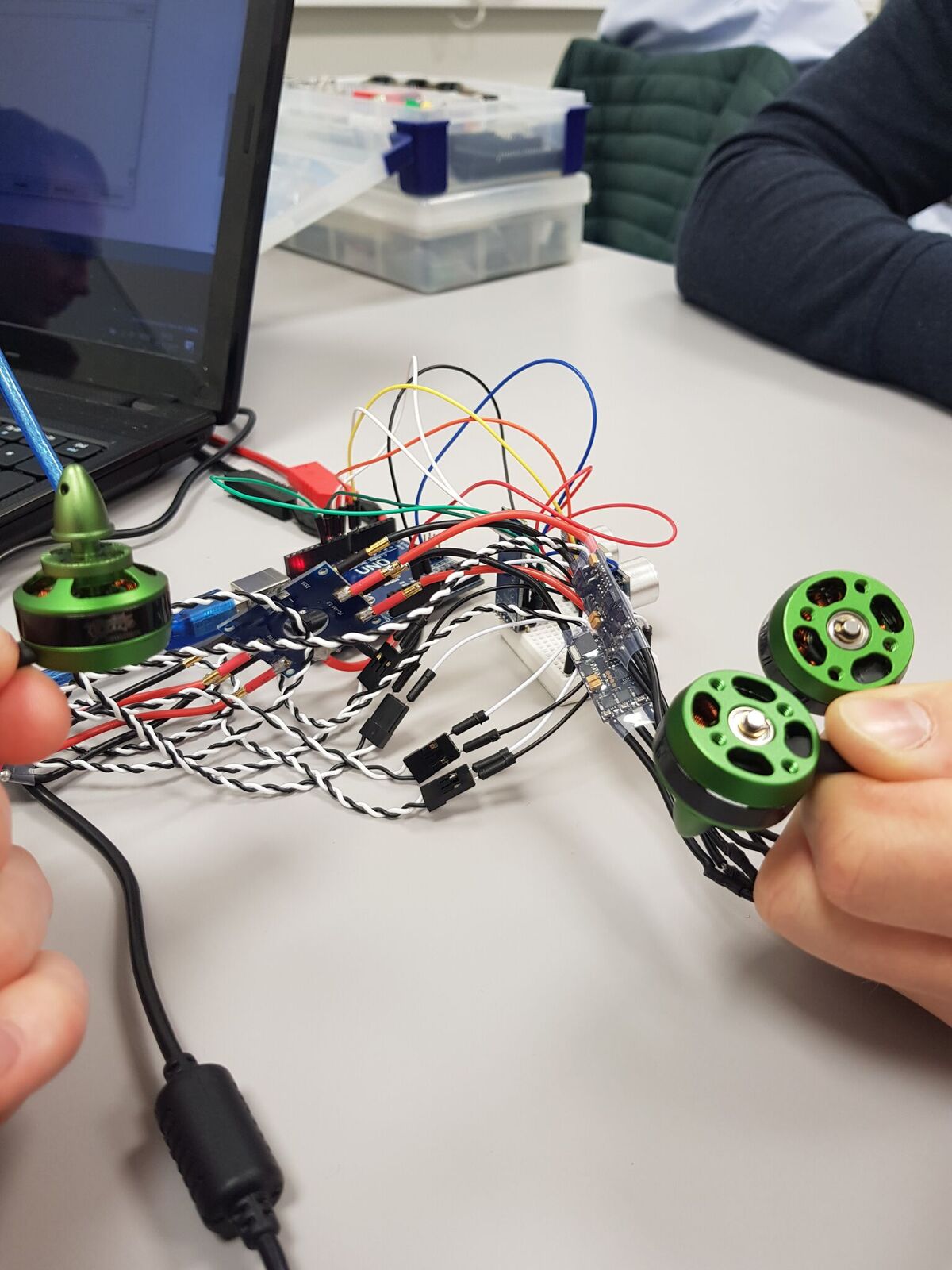
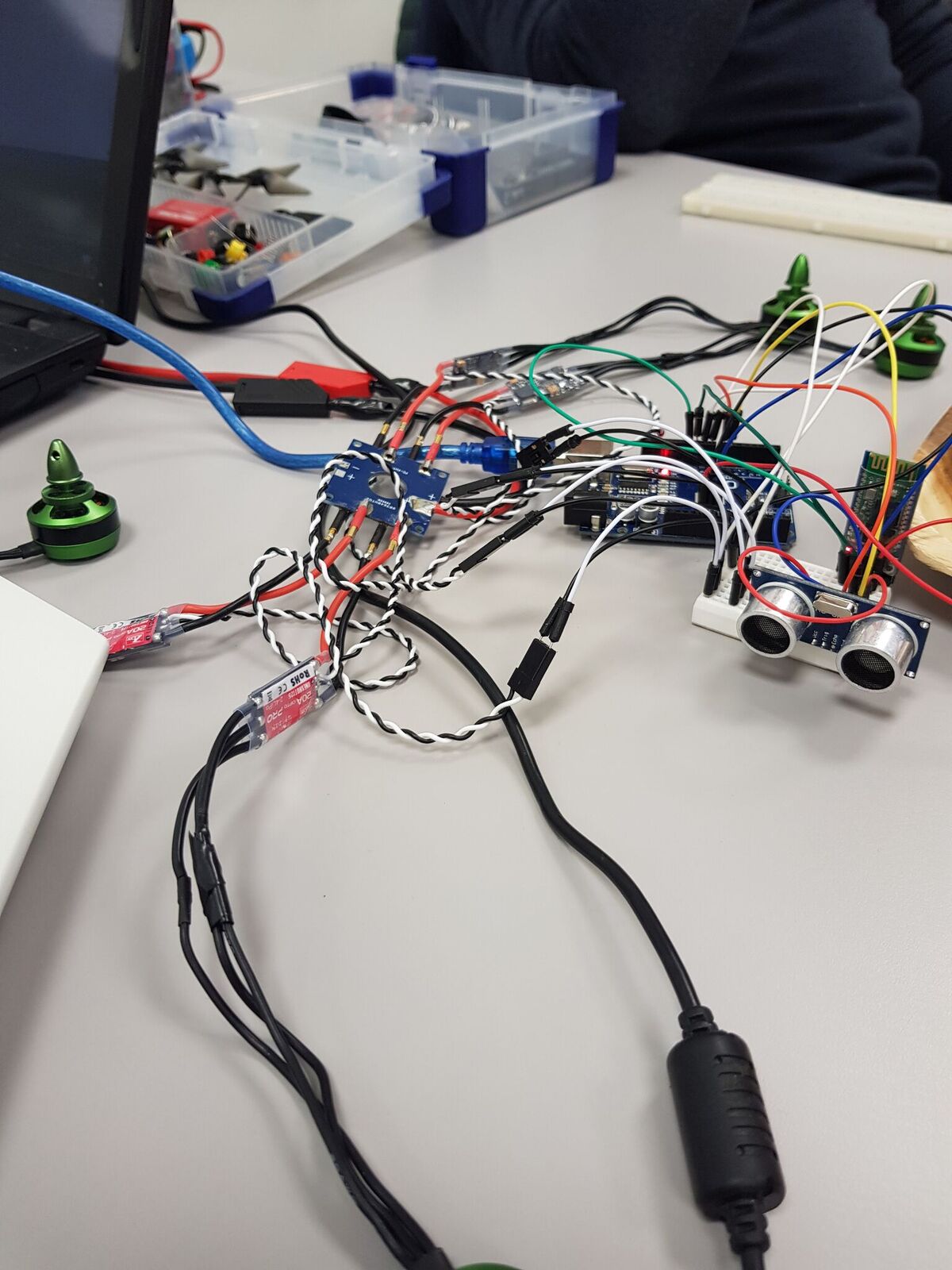
Gruppen møttes i dronesonen og begynte å jobbe med mulighetene for å koble sammen flere motorer, slik at vi kan kjøre alle fire motorene samtidig. Dette ble gjort ved å modifisere koden fra forrige gang. Vi måtte også finne en annen strømkilde enn 9-volts batteriet som vi har brukt tidligere. Vi fikk litt problemer med to av motorene, ettersom de skal gå motsatt vei som de andre. Etter litt testing fant vi ut at vi hadde loddet to av motorene feil, ettersom de skal være counter-clockwise, så disse kjørte ikke ordentlig før vi fikk loddet på nytt. Etter riktig lodding og en god del koding fikk vi alle motorene til å kjøre samtidig. Deretter begynte vi å legge til ultra sonisk sensorer, slik at vi kunne eksperimentere med fartsøkning når den detekterer hindringer. Vi prøvde også å implementere for-løkker for å få en mykere start og stopp av motorene.
14.11.2017
Gruppen møttes i dronesonen og fortsatte der vi slapp forrige uke. Vi fant fort ut at rammen vi allerede hadde laget til dronen var for liten, og Markus måtte derfor tegne og skjære ut en ny ramme. Resten av gruppa jobbet videre med å samkjøre ultra soniske sensorer sammen med motorene, og få disse til å kommunisere med hverandre basert på målinger som blir gjort. Vi monterte motorene på rammen for å se hvor mye de løfter, men vi fant ut at strømkilden vår ikke var tilstrekkelig for å drifte alle fire motorene på full styrke samtidig. Vi hadde noen problemer med å få alle til å kjøre samtidig, men dette ble fikset med litt koding.