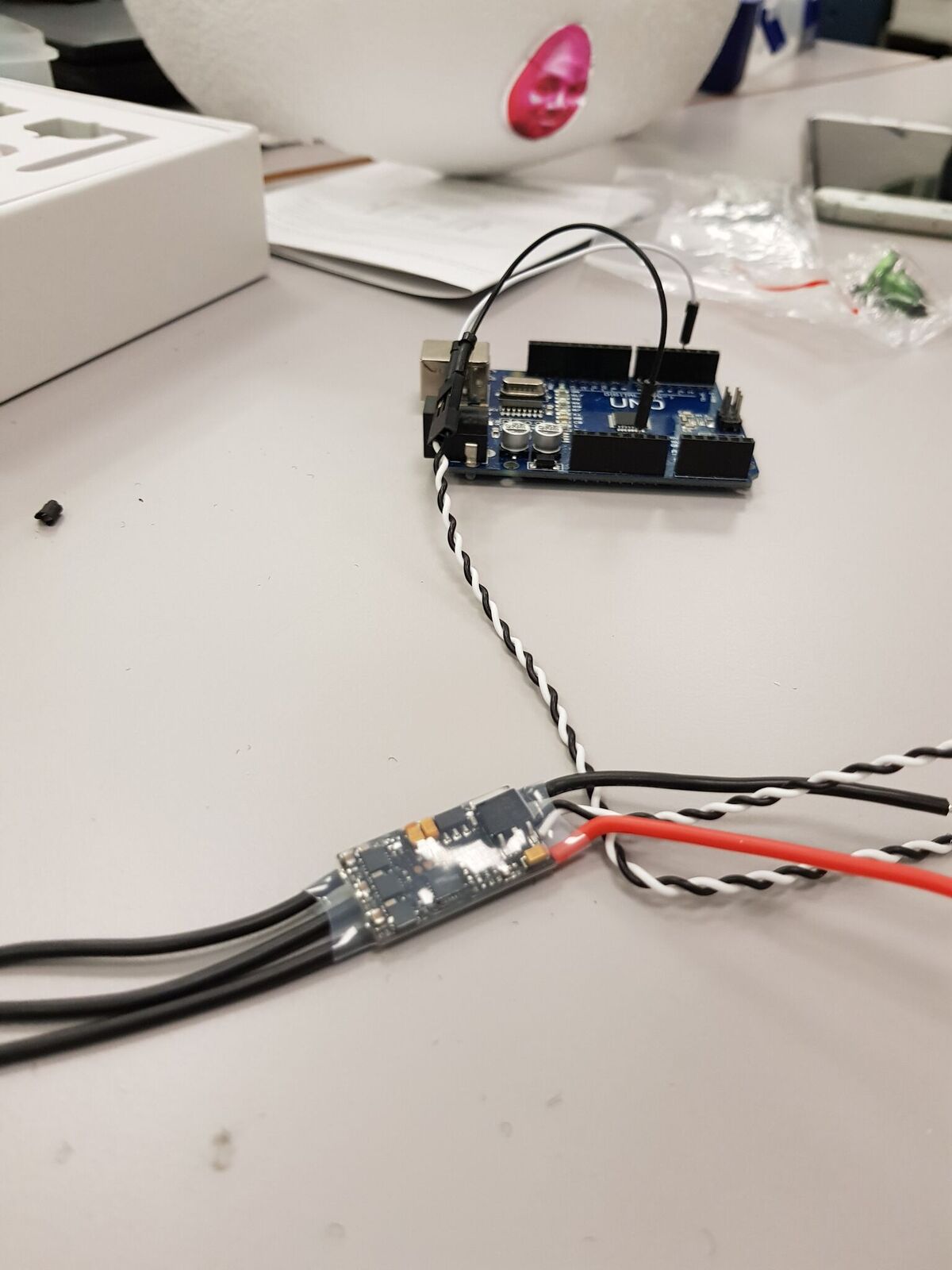
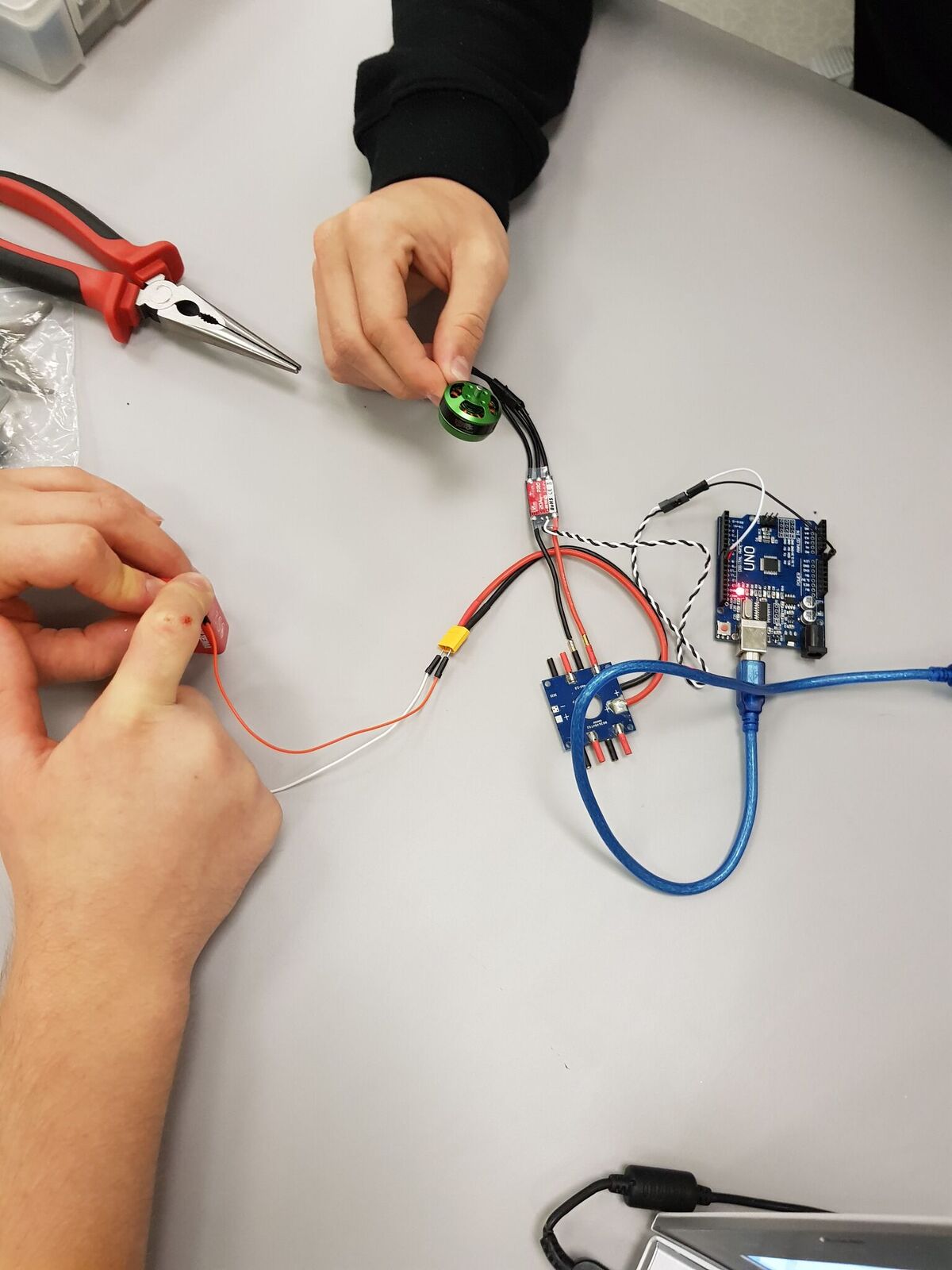
Idag har gruppen sittet sammen og jobbet i dronesonen. Endelig mottok vi de delene vi hadde bestilt, og kunne begynne å bruke riktig utstyr i utviklingen av prosjektet. Pakken besto av propeller, motorer og elektronisk fartskontrollere (ESC). Vi startet med lodding slik at en motor fikk strømmen og informasjonen den trengte. Deretter brukte vi mye tid på å planlegge kodestrukturen for motoren og hvordan de skulle settes sammen. Den første testen med motoren var for å se at den fungerte. Da vi fikk se at motorene fungerte, endret vi litt i de simple kodene, slik at det ga oss en mulighet til å endre farten til motoren, mens den kjørte. Vi brukte en variable som gjorde at det innskrevne tallet ble farten til motoren. På en slik måte skal dronen kunne akselerere motorene mer desto nærmere hindringen sensorene kommer, slik at den vil løfte dronen vekk fra registrert hindring.
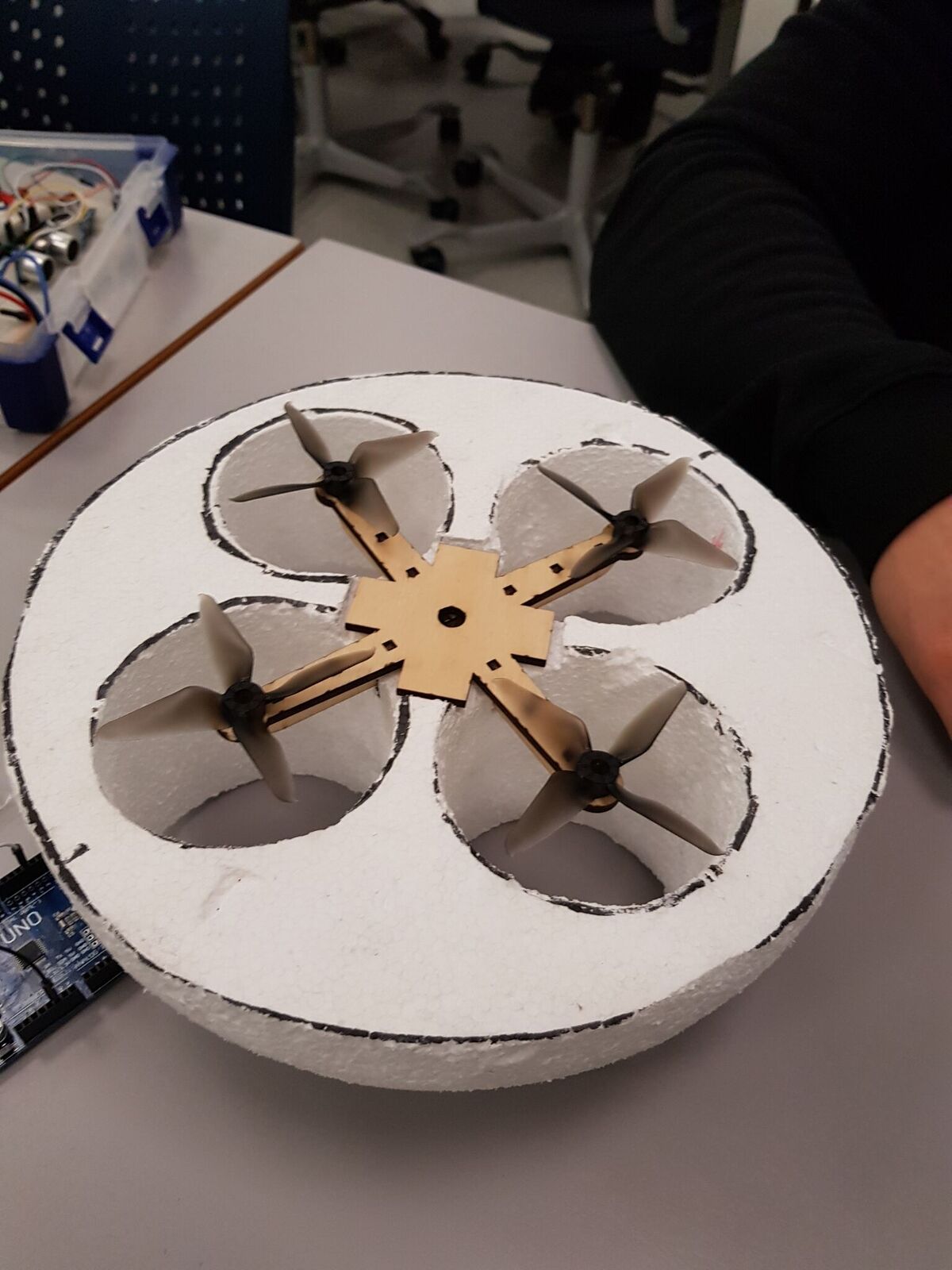
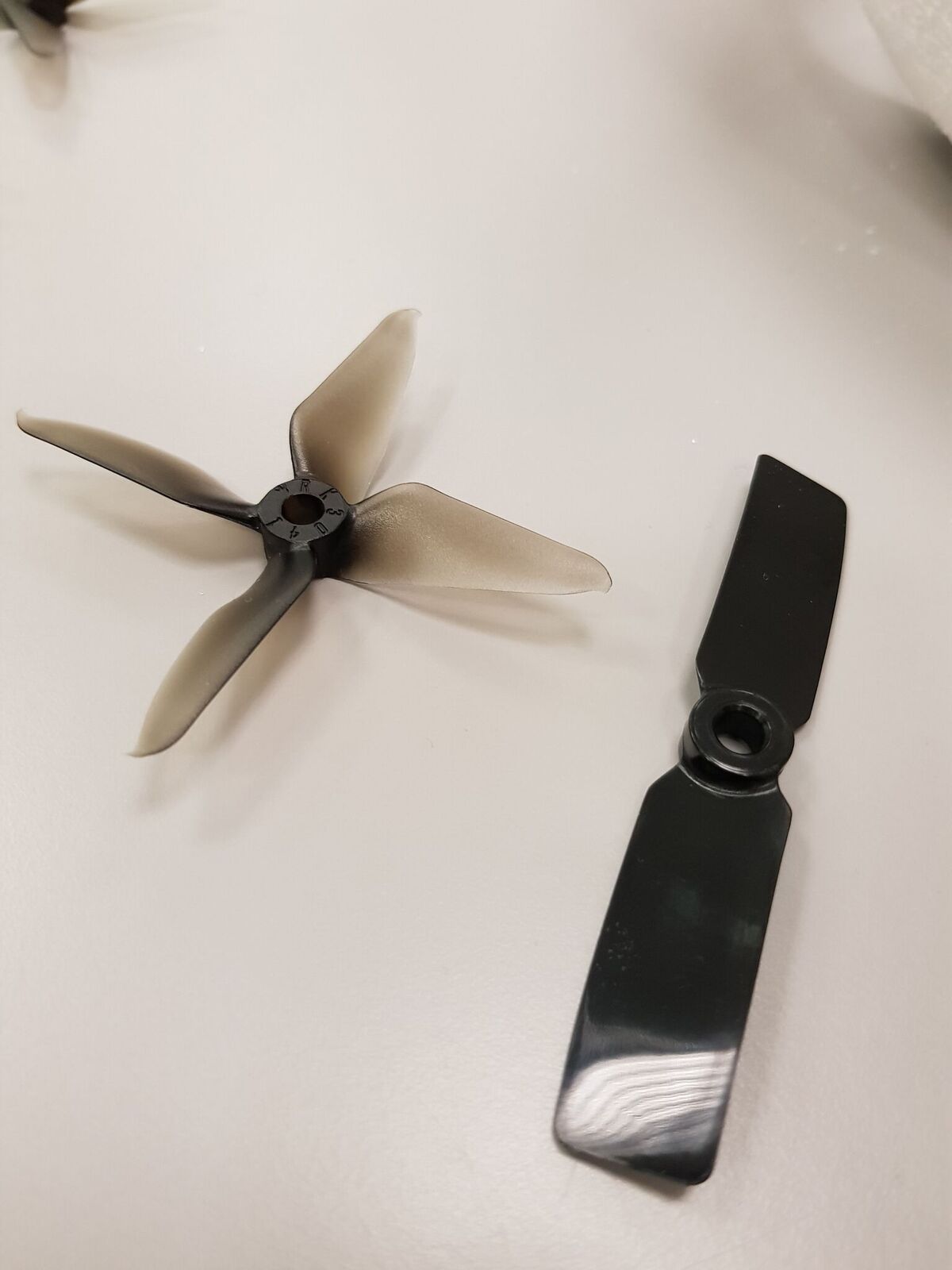
En annen ting vi fant ut var at motorene ikke passet helt med rammen, så vi må modellere og skjære ut en ny som er litt større der hvor motorene skal festes. Nedenfor kan dere se modellen, samt motoren og propellene.