Hello world!
as usuall its been a long time since posting and i will now ramble about our progress and future with this project.
Mechanical has pretty much continued on working on cad models and producing parts for the car. we are hoping to start assembling the car soon.
Alot of exiting things has happend in electrical and computer part of the project. We’ve gotten both lidars to work and produce data. This is really exiting because this means we can start building the car real soon.
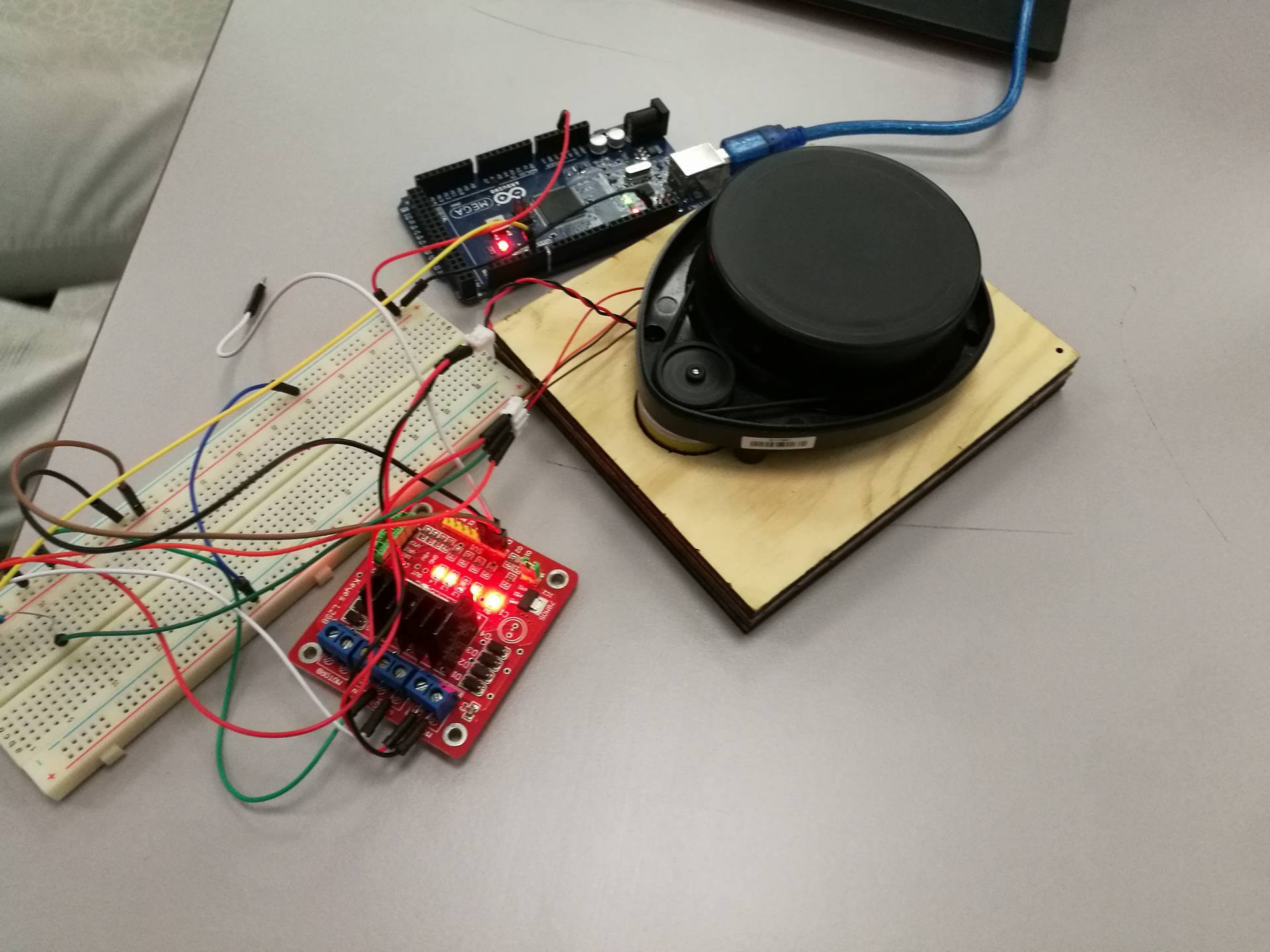
The simple lidars we’ve succesfully managed to connect to arduino and a dc motor. The dcmotor will controll the turning of the car as shown in the video below. The current turniung system works as follows. We have 2 lidars that meassure lenght. Theoreticly this is both sides of the car. As long as the lengths are the same the car is in the middle of the driving space, but as soon as a length is shorter than another the car turns. this is because if one distance length is shorter that means that the car is moving towards a wall. We’ve incorperated a buffer as well because we dont want the car to aim for 100% equality in lengths
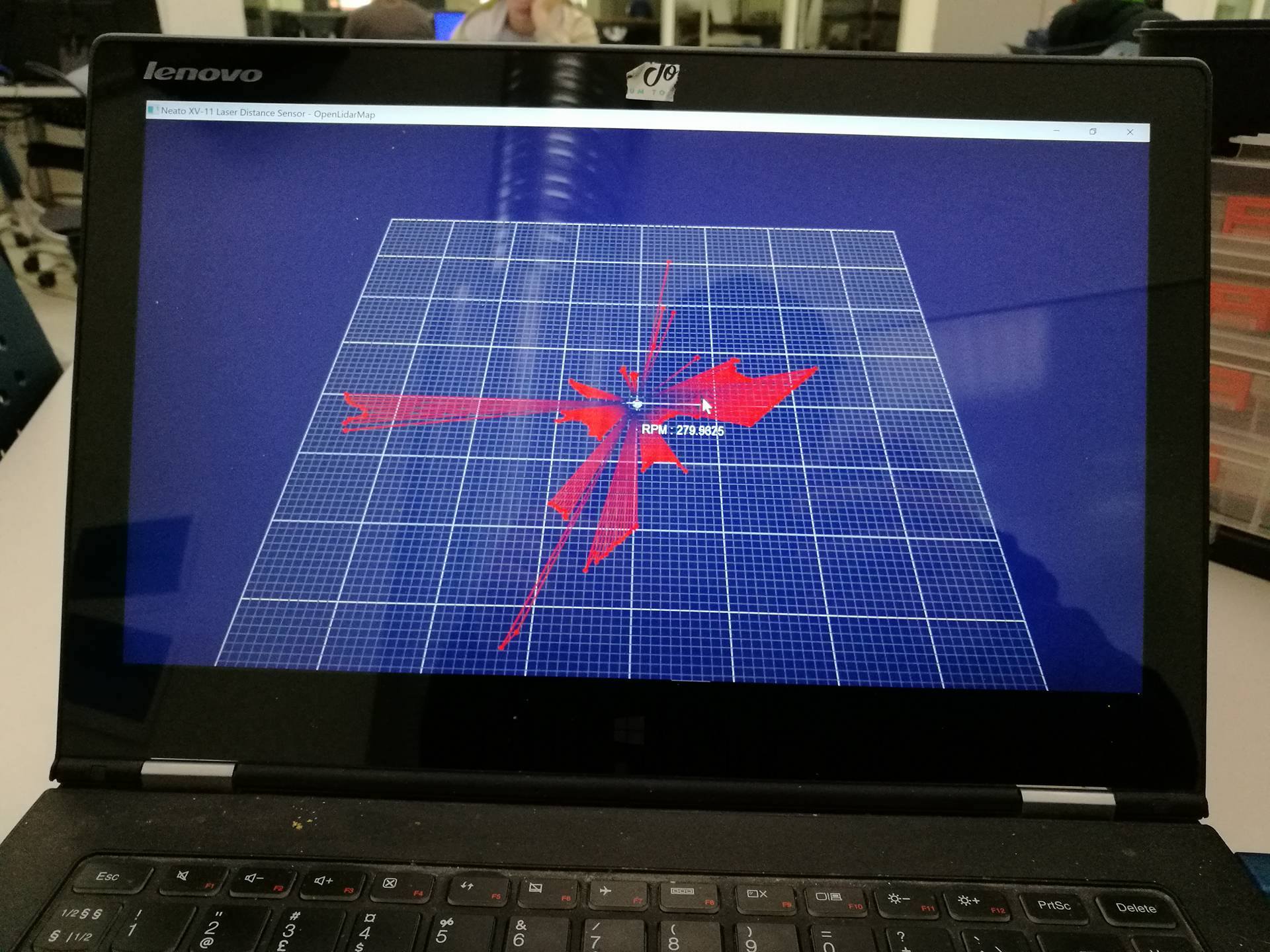
Looking at the 360 lidar we’ve connected it to arduino and used python to get a visual representation of the data recieved. We are hoewere still unsure of how to use the data recieved but we will research and look into it further. We might need change or add an new microcontroller because we are usure of converting raw data to usable data.
The next part of the project will be continuing with current work. For computer and electrical that will be translating the raw data from the lidar to some we can use on the car. and mechanical will continue produce parts and components so we can start building.
see you soon
Group 6