Analyzing images to find blood vessels.
Our goal is have the system automatically recognize blood vessels in images taken by our NIR camera. Preferably a big and easy to reach blood vessel, but any blood vessel large enough to be stabbed with a needle is acceptable.
We have not yet reached a final solution, but we have a rough outline of what the program will do.
First we want to remove noise and unnecessary information from the images, by filtering the image. To do this we are considering using a FIR filter with machine learning to improve filtering over time, or the color thresholder app in matlab.
The goal is to have an image containing only clearly visible blood vessels. To enhance them we can use the fibermetric function in matlab, which “Enhances elongated or tubular structures in image”. With this we will hopefully have an image which is easy to analyze.
The image analyzer will send a point on a grid to the robot, which used the grid to place the needle. To find a point on a blood vessel we have currently settled on a hough transform, which identifies lines in images. A point on a blood vessel can be found by simply choosing a start or end point on a line found by the hough transform, but this is sub-optimal, since the point will be on the edge of the vessel, and not in center. This is why we have to analyze the resulting lines from the houghes transform, in order to find the center of a blood vessel. We have not yet settled on a method for doing this.
We have create 2-D grid coordinates in Matlab, with x-coordinates defined by the vector x and y-coordinates defined by the vector y. Set 1 mm between each dot. Can move 6.5 cm on the x-axis and 12 cm on the y-axis. This gives 120 dots in the y-axis and 65 dots in x-axis. Before testing this in Raspberry pi, we want too get the camera working.
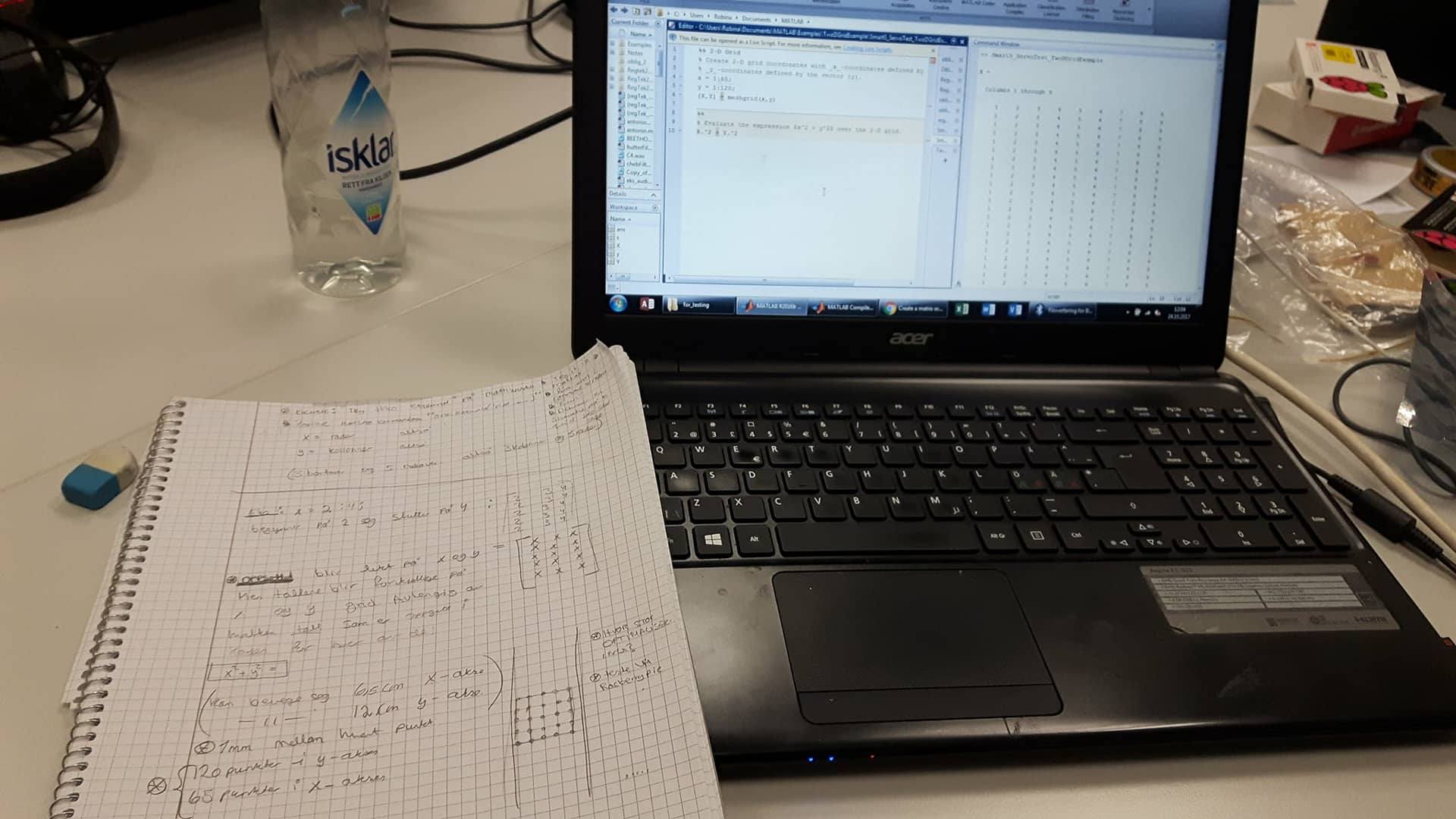
Matlab meshgrid
But we have tested the servo motors in Arduino, just too see how they worked. They did not respond as they should, because it was just one of them who worked. Not the both of them at the same time.
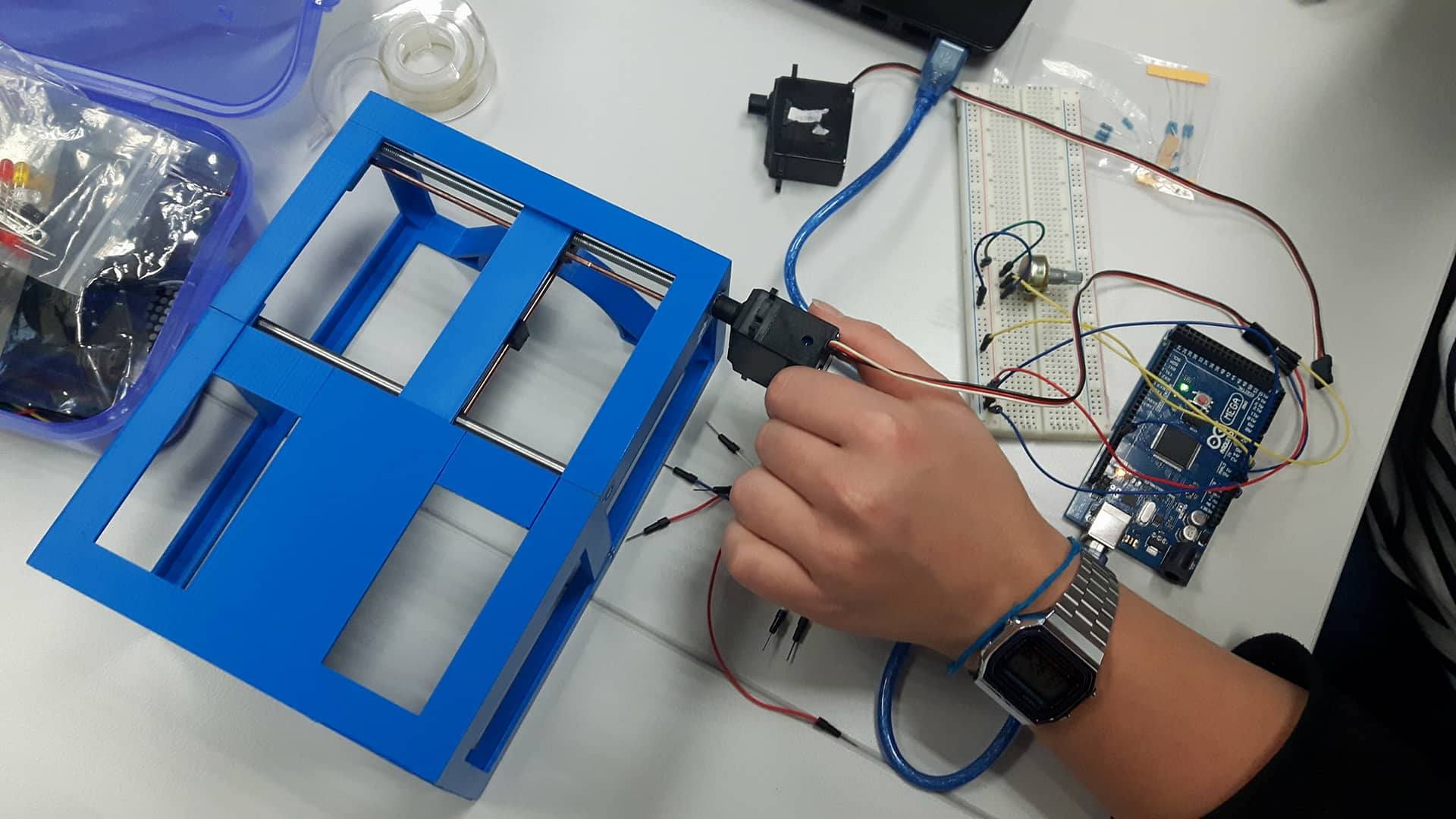
Servo motor tested by Arduino
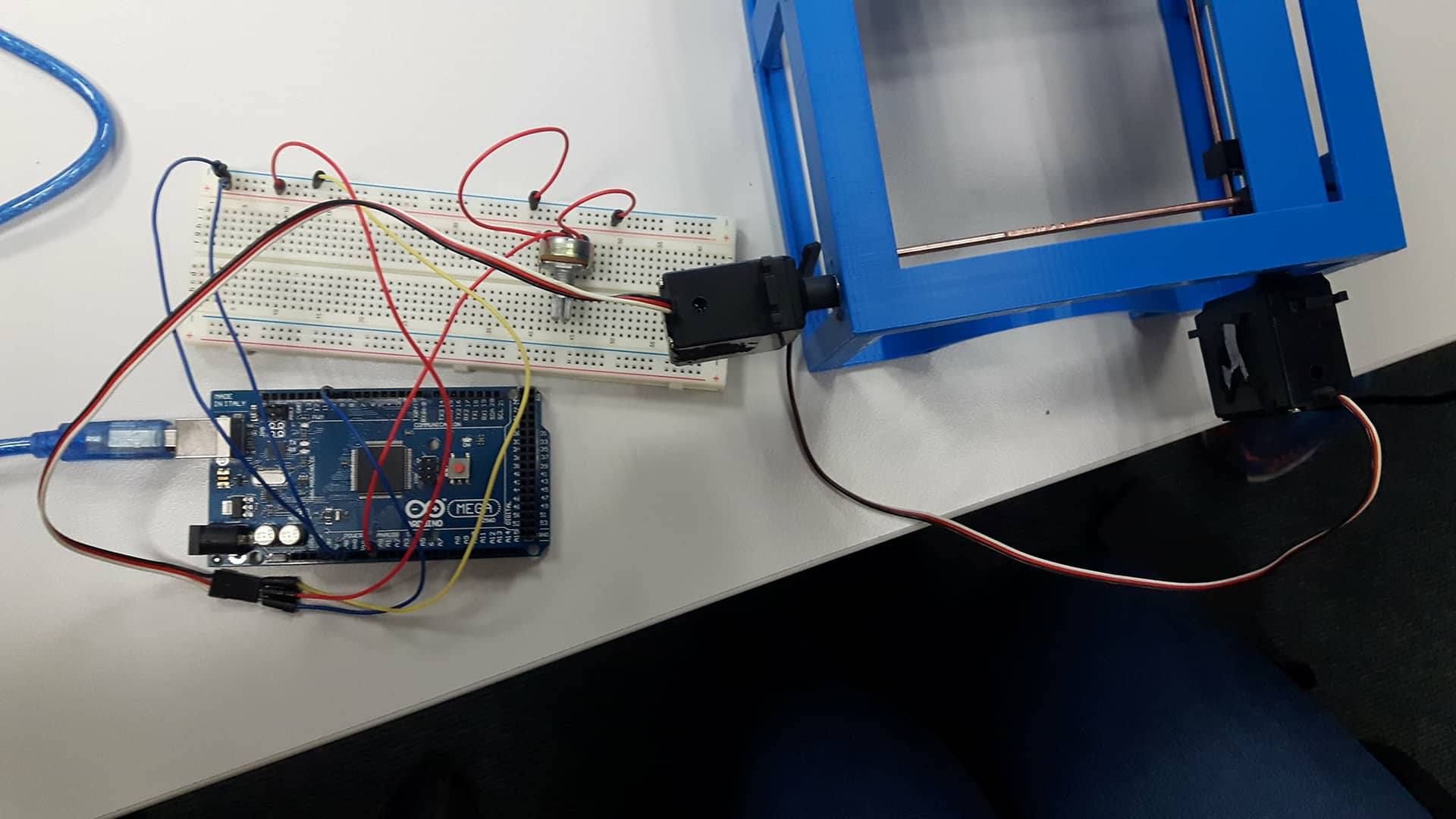
Two servo motor tested by Arduino
Still working with optical response and troubleshooting to get the camera working.
