Introduksjon
Vi er en gruppe på fem ivrige studenter ved Høgskolen i Sørøst Norge, Campus Kongsberg. Gruppen har en tverrfaglig kompetanse, i og med at vi har studenter fra hver ingeniør linje representert på denne skolen. Vi er tre data-, en elektro- og en maskinstudent og utgjør sammen gruppe nr 1.
Maskin
Markus Hjellseth
Data
Daniel Haugnes
Fredrik Olsen
Ole Marius Norderud
Elektro
Deivy Kazokas
Oppgave
Smart systems-prosjektet går ut på å designe et system som skal operere i sanntid og ikke ved konstant input fra bruker, den skal med andre ord greie å ta egne avgjørelser. Oppgaven gruppa har bestemt seg for er å designe og bygge en smart drone. Den skal kunne detektere hindringer og ta avgjørelser basert på målinger den gjør. Vi kan for eksempel styre dronen mot en vegg, og forvente at den skal ved hjelp av avstandsmålinger oppdage denne hindringer, deretter overstyre brukeren for å manøvrere unna en potensiell kollisjon. Videre har vi tenkt på flere mulige ekstra funksjonsjoner, hvorav en av mulighetene vi har sett på er å få dronen til å rulle på bakken ved hjelp av gyroskopet, derfor og det runde designet.
Fremdriftsplan
22.08.2017
I begynnelsen av faget delte vi oss opp i grupper. Lærerne ga oss en kort introduksjon til faget med krav og forventninger til oss. De viste tidligere prosjekter og resultater samt forklarte oss fordeler og ulemper med noen av tidligere studenter sine løsninger. På slutten av dagen diskuterte vi sammen, og kom med ideer til hva slags prosjekt vi kunne tenke oss å jobbe med, samt avtalte å finne inspirasjon til neste gang vi skulle møtes.
29.08.2017
Gruppen kom med et par ideer, som en selvbalanserende robot, en maskin som kan sortere «Skittles» etter farge eller en selvkjørende bil som unngår sammenstøt. Ettersom oppgaven i faget er å designe et smart system må man modifisere produktet vårt til å reagere uten at brukeren gir ordre om det. Dette gjør produktet til et smart system. Dersom vi lager et kjøretøy vil den ha sensorer foran som gjør at den alltid kjører unna og unngår sammenstøt. Vi ønsket å høyne vanskelighetsgraden med å gjøre noe lignende i luften, derav en drone med lignende sensorer.
05.09.2017
Vi bestemte oss for at vi skal gå for drone ideen vår. Vi tok kontakt med lærerne og ba om godkjenning for planen vår, og hørte om det holdt og var innenfor rammeverket lærerne har. Sammen med Joakim, ble vi enige om at vi skulle prøve og videreutvikle dronen så mye som mulig ved tilleggsfunksjonen som å utnytte det runde designet til å få den til å rulle, GPS-styre posisjoner den skal dra til, muligheten for at man kan ha en arm under donen for å kunne fly ut livbøyer til personer i nød. Alt ut i fra hvor simpel og lettvint droneoppbygningen ville være, og hvor mye tid vi brukte på planlegging og anskaffelse av materiale.
12.09.2017
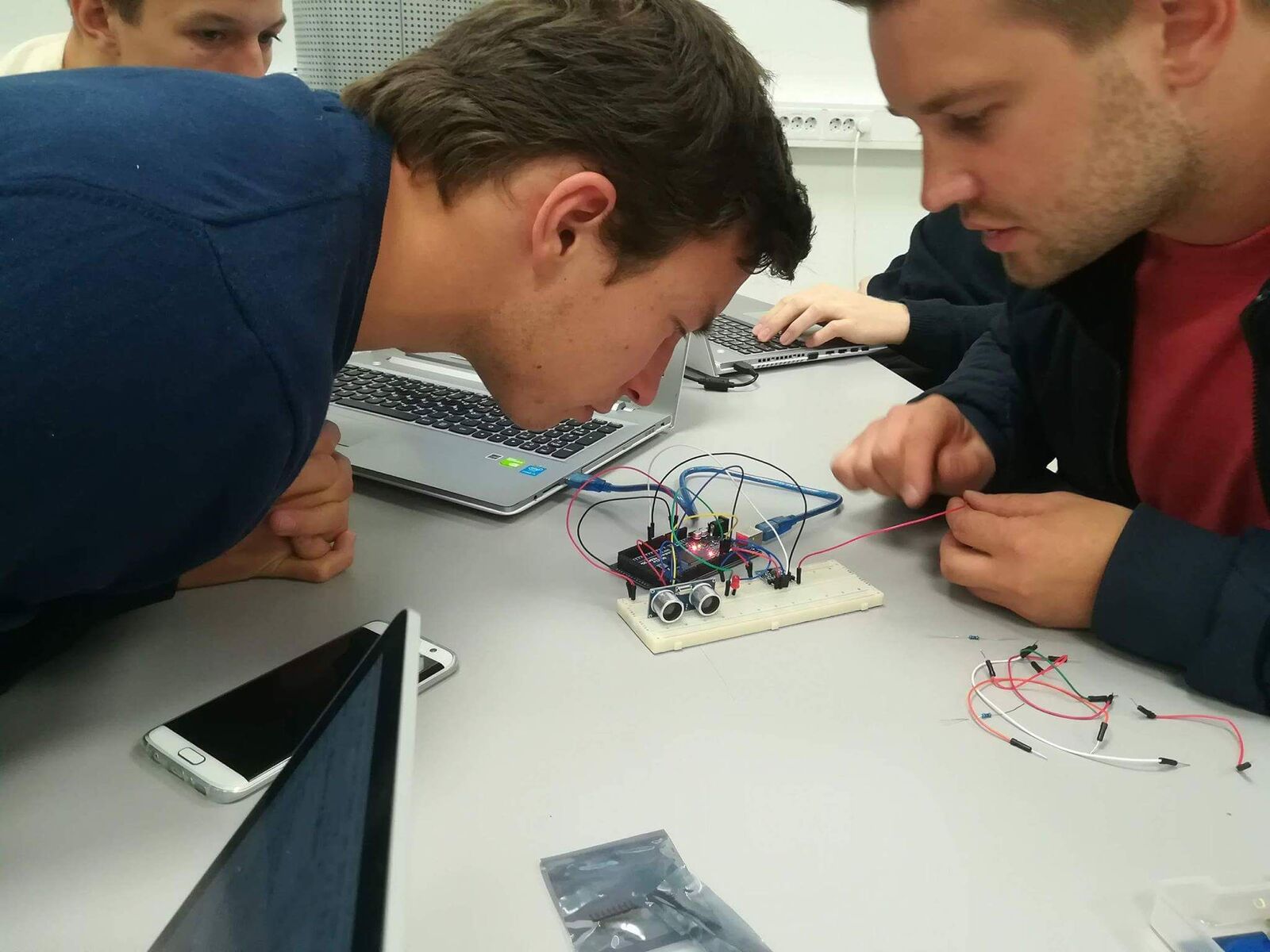
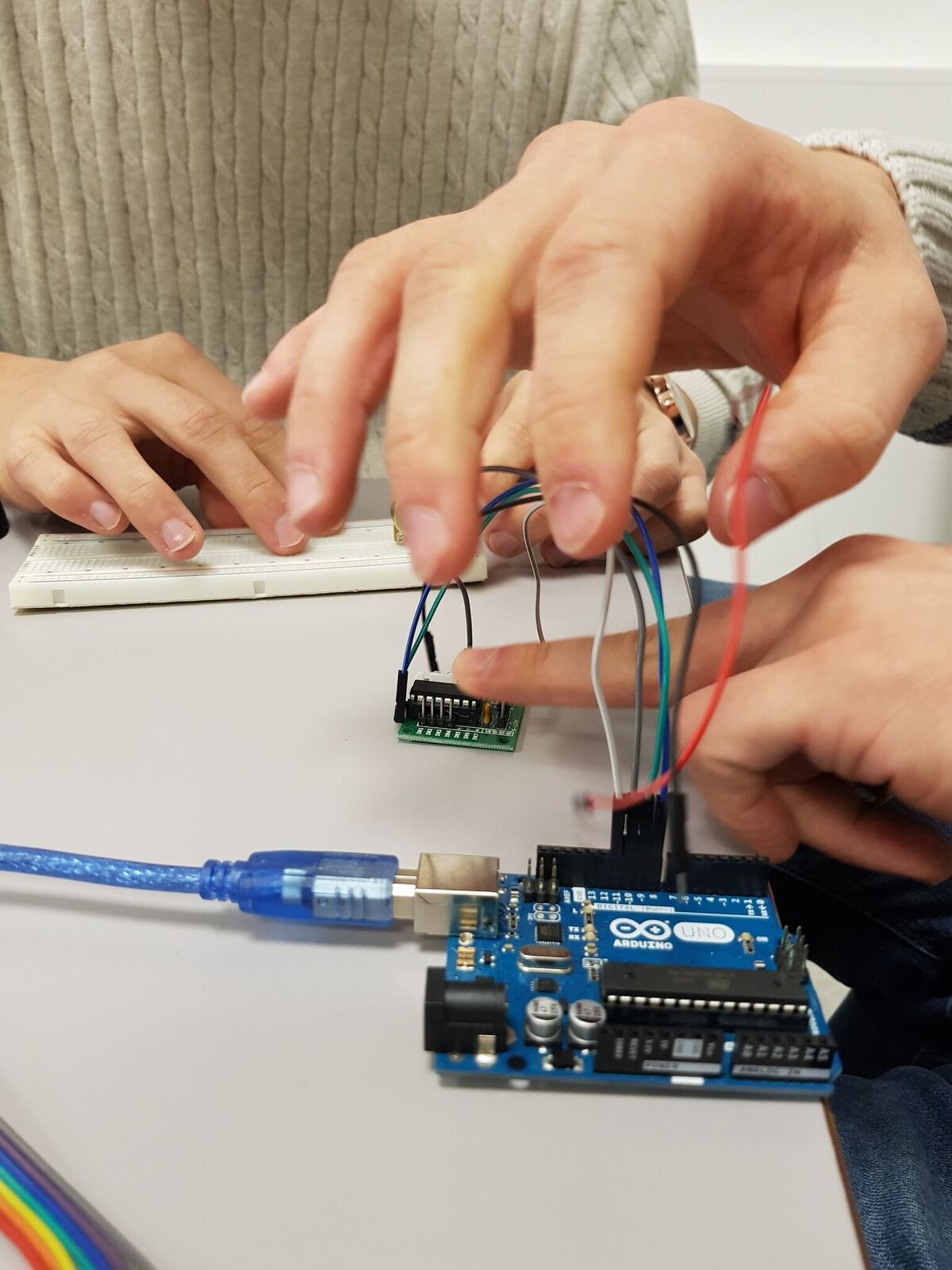
Gruppen testet ut bruk av Ultra Sonic sensorer for å måle avstand til objekter. Vi har koblet og programmert en sensor slik at vi kan lese av avstand til objekter og foreta mange og raske målinger hele tiden. Vi har koblet på en sensor, men trenger flere slik at vi kan dekke en større synsvinkel, hver av sensorene har i utgangspunktet et synsfelt på 15 grader hver. Vi skal programmere disse sensorene til å gi beskjed om vedvarende hindringer, som gir oss informasjon slik at vi kan igjen programmere handlinger dronen skal gjøre, som for eksempel å snu dersom den støter på hindringer. Etter testing ser vi at det oppstår målefeil som gjør at sensoren tror den er rett ved siden av noe, og gir oss varsel. Derfor programmerte vi inn en teller som kun reagerte når det var 5 avstandsvarsler etter hverandre for at koden skal være overbevist om at det er en hindring i nærheten, og ikke bare en feilmåling.
19.09.2017
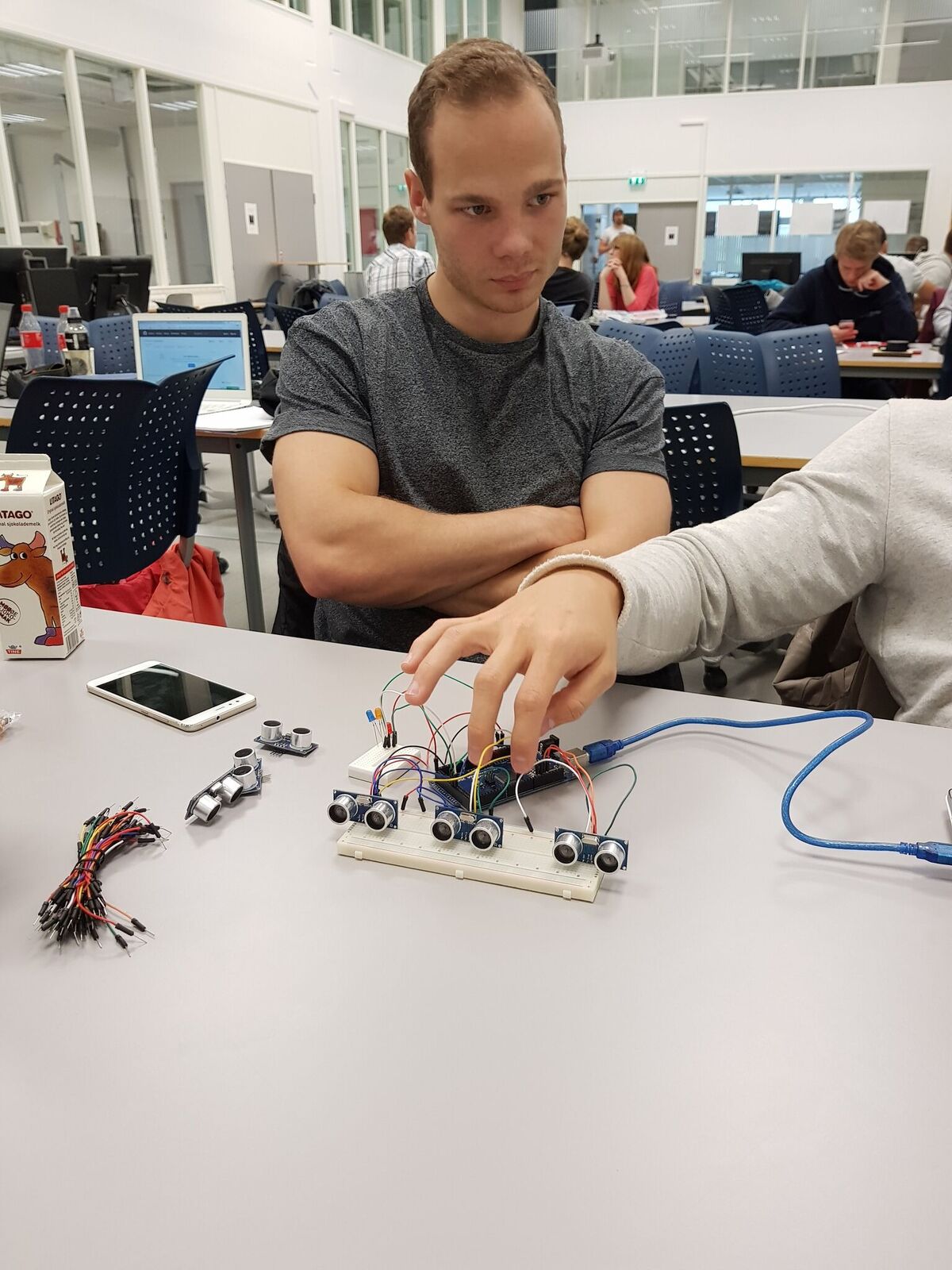
Etter forrige ukes forsøk med en enkelt avstandssensor koblet vi nå opp tre stykker. Alle sensorene ble satt opp med hvert sitt lys som skulle lyse dersom tilhørende måler telte fem varsler, som tilsier at en hindring er nærme. Ettersom vi ikke har deler eller fungerende motorer valgte vi å bruke lys for å simulere at riktig «motor» ville økt hastighet for å styre unna nærmeste hindring. Etter flere forsøk, noen små feilkoblinger og enkelte skrivefeil i koden fikk vi tilslutt alle sensorene til å måle avstander på riktig måte, beholde hver sine varseltellere og gi melding til riktig LED lys som simulering av at hver sensor sendte meldinger til riktig motor. Varseltellerne ble satt opp slik at varsellampen lyser så varseltelleren er over en bestemt sum, og slå seg av etter hvert som den er under igjen. Varseltelleren trekker i fra en gitt sum for hver måling som ikke oppgir at den nærmer seg en hindring.
26.09.2017
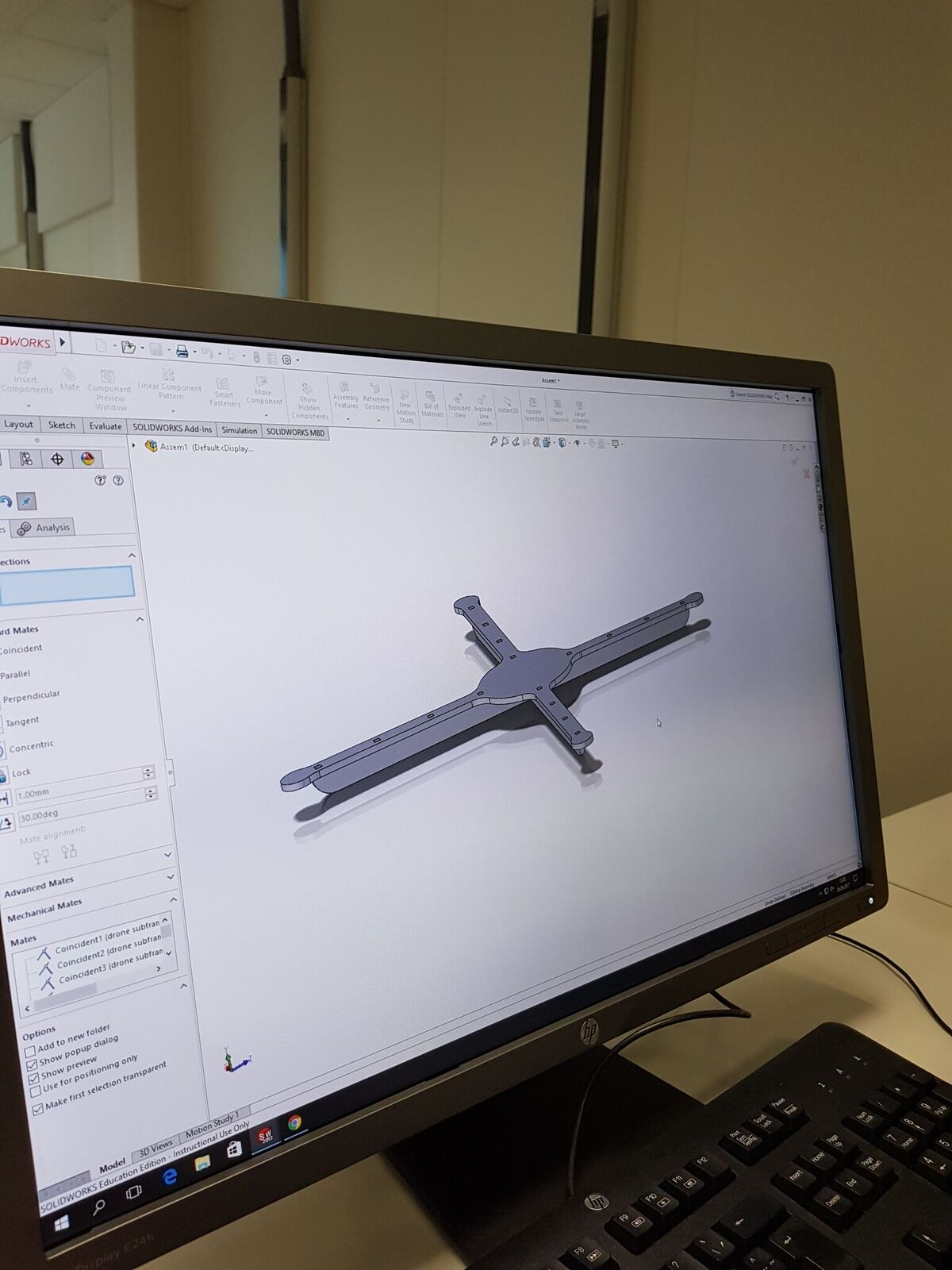
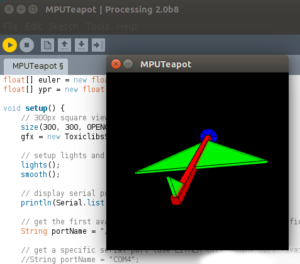
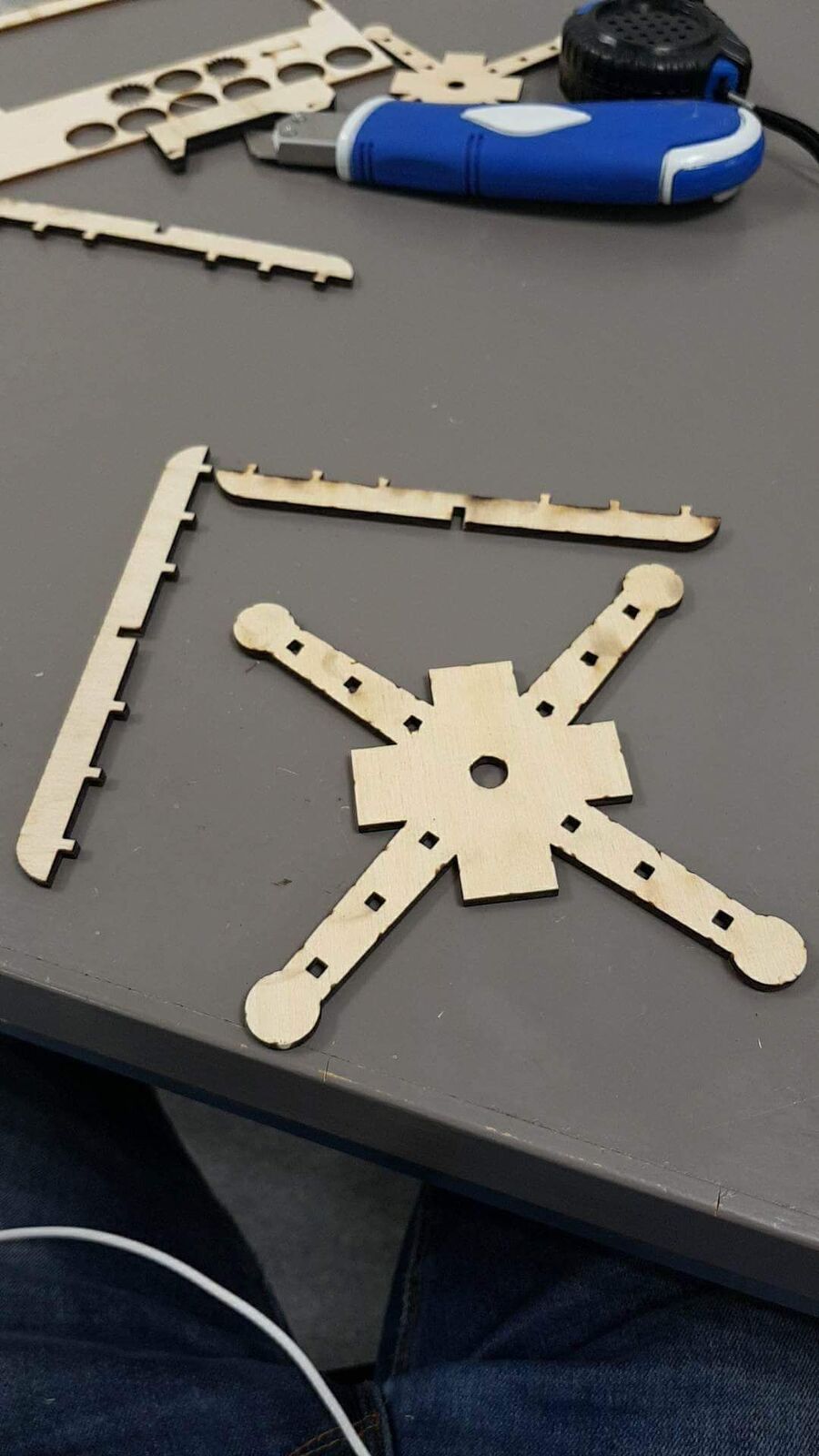
En drone er avhengig av en gyro for å kunne vite hvordan tredimensjonal vinkling den har. Vi koblet en gyro til vår «Arduino Mega», men det var mye vanskeligere enn først antatt. Vi brukte forskjellige guider uten hell. Etter mye søk på nettet og lignende problemstillinger for andre, fant vi ut at problemet lå i selve brettet. Det vi måtte gjøre var å bytte mega-brettet vårt til et uno-brett. Deretter fikk vi gyroen til å fungere optimalt ganske kjapt med guidene vi hadde brukt tidligere. Neste steg ble å kalibrere gyroen slik at den leser av riktige verdier. Etter en del koding, med feiling og nye forsøk fikk vi kalibrert gyroen slik at den leser av korrekte verdier med riktige nullpunkter. Ved bruk av gyro og en 3D simulering, klarte vi å lage et bilde om hvordan den oppfører seg i det tredimensjonale rommet den befinner seg i. 3D simulering gjør det enklere for oss å forstå hvilken retning gyroen peker til enhver tid. Samtidig som data og elektro brukte tid på oppkobling av gyroen har maskin begynt med 3D modelleringen av selve rammen som sitter i midten av isopordronen vår.
3.10.2017
Deler av gruppen var bortreist, jobbing på egenhånd.
10.10.2017
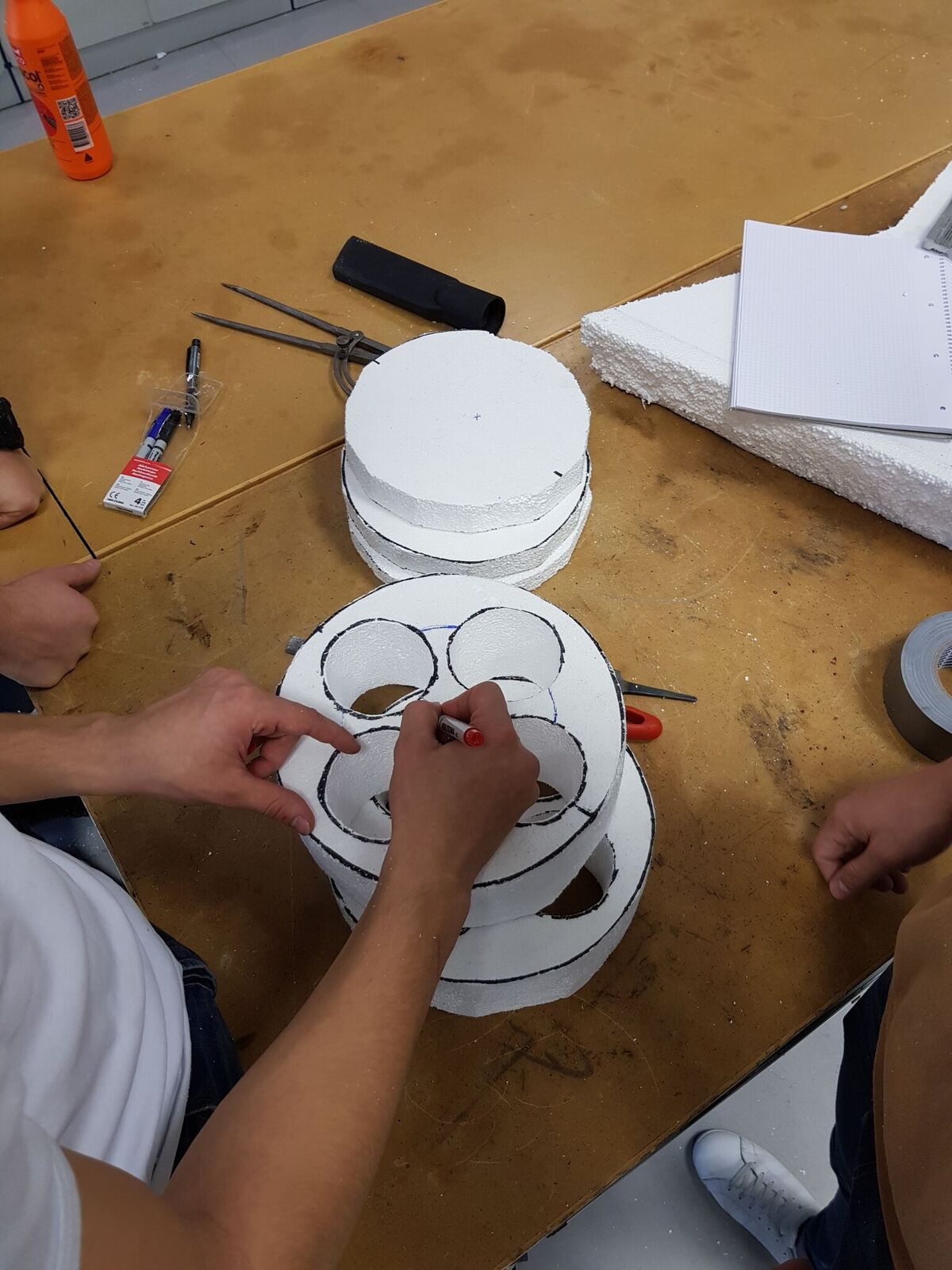
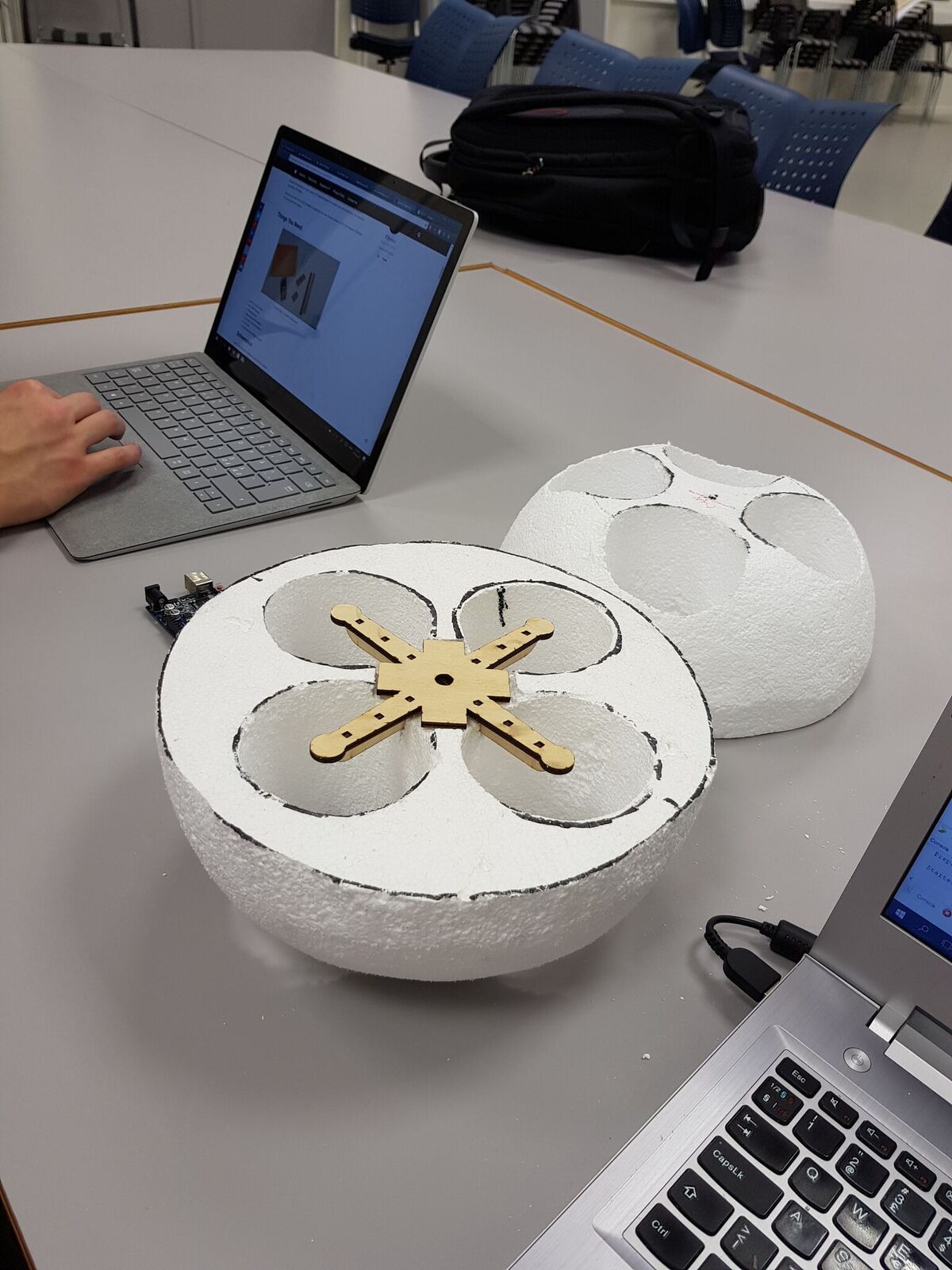
Etter gjentatte forsøk på å få tak i isopor fra forskjellige bedrifter, fikk vi isopor fra Montér. Deretter brukte gruppen mye av dagen på å skjære ut, planlegge og tegne utformingen av isopordesignet. Gjenstår fortsatt litt etterarbeid på noen deler av designet, ettersom de tre øverste centimeterne skal limes på i ettertid, ettersom isopor bredden var for liten i henhold til designet vårt.



17.10.2017
Gruppen sitter sammen i dronesonen. Markus og Fredrik skjærte ut isoporen slik at rammen til dronen skulle få plass. Gruppen gjør litt research på teknologier.

24.10.2017
Gruppen er samlet i dronesonen. Jobber med koding og kobling av stepper motor control. Vi ser da på om vi kan kontrollere farten på hver av motorene vi skal bruke i dronen, slik at vi kan styre hver enkelt motor individuelt.