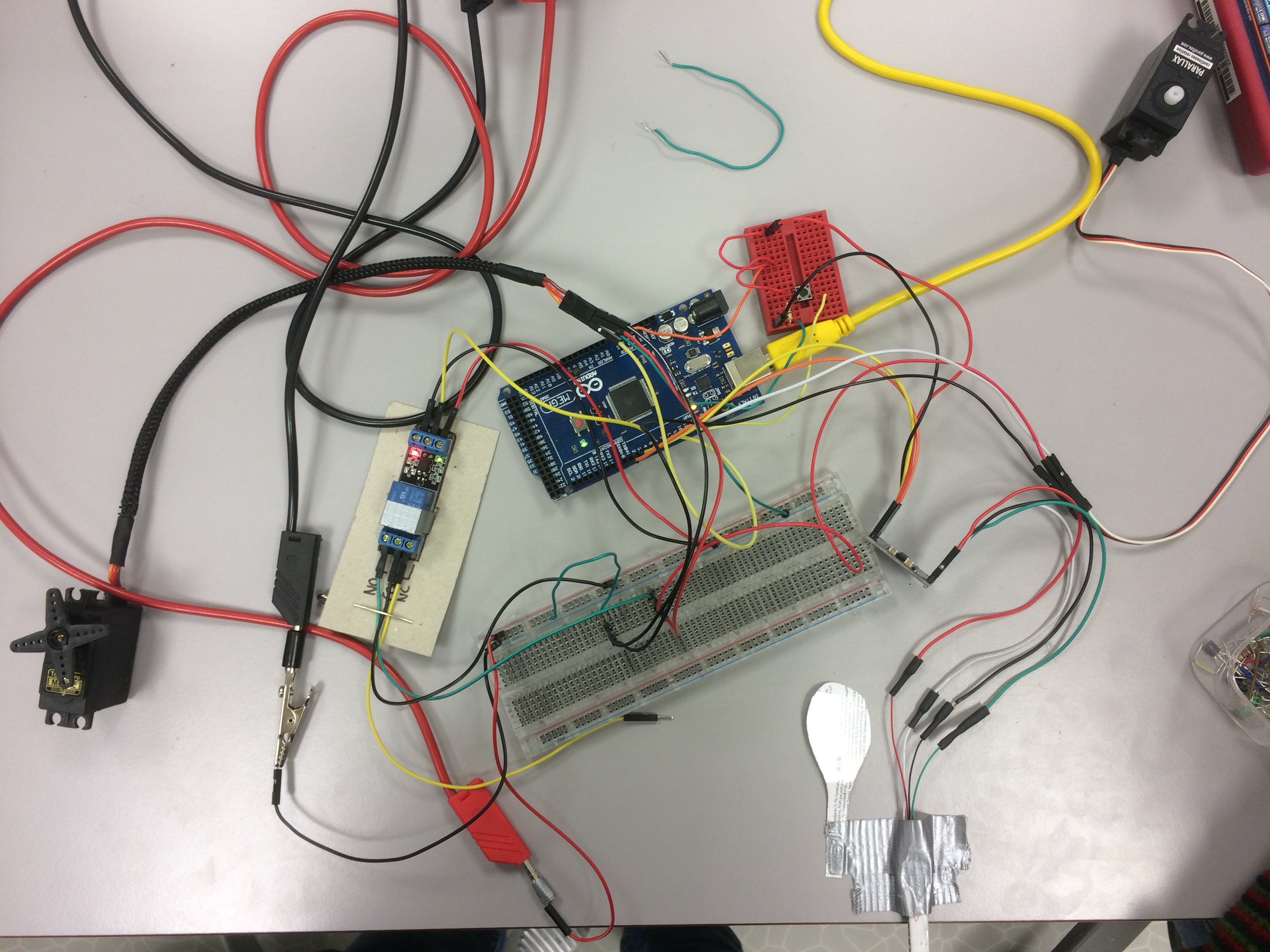
With some help we were now able to connect the two required motors to the arduino.
The hardware works in the following manner:
- A pushbutton activates the system
- the relay switches so that the motors are connected to the powersupply
- the 360º servo starts rotating: it presses the toothpaste out and onto the toothbrush. the toothbrush is attached to a loadcell
- the loadcell measures the weight and gives a signal back to the arduino
- if the weight reaches a certain limit, the first servo stops moving,
- the second 180º servo starts and opens the door so that the user can grab the toothbrush
- as soon as the user puts the toothbrush back into its bracket the door closes and the process is finished
The code is not yet finished completely.