Fremdrift
Denne uken fikk vi printet ut platene til roboten vår, så vi kunne starte sammensetningen av roboten. Platene ble tegnet i Solidworks og så laserkuttet i trefinér.
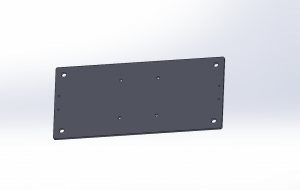
Ut ifra fysikken involvert, så ønsker vi mest tyngde i toppen av roboten. Dette skaper et større treghetsmoment, som minsker oscilleringene ved overshoot fra motorene. Tenk deg å balansere et kosteskaft med håndflaten.
Vi har fått på plass rammeverket, koblet sammen alle komponentene, og gjort noen tester for å sjekke at det fungerer som forventet.
Slik ser den ut
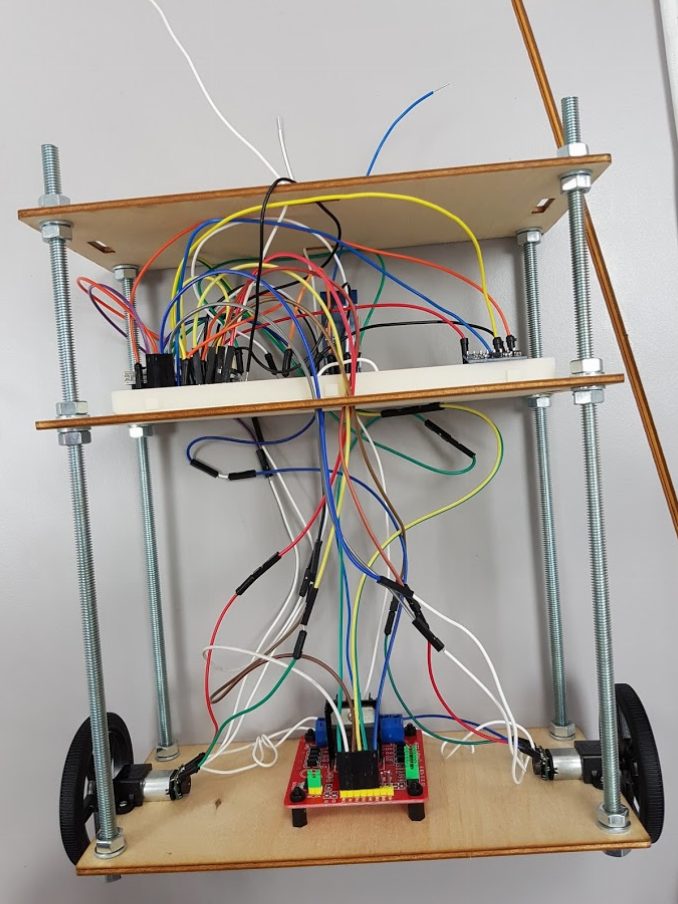
Det begynner å ligne på det vi hadde i tankene da vi startet på prosjektet.
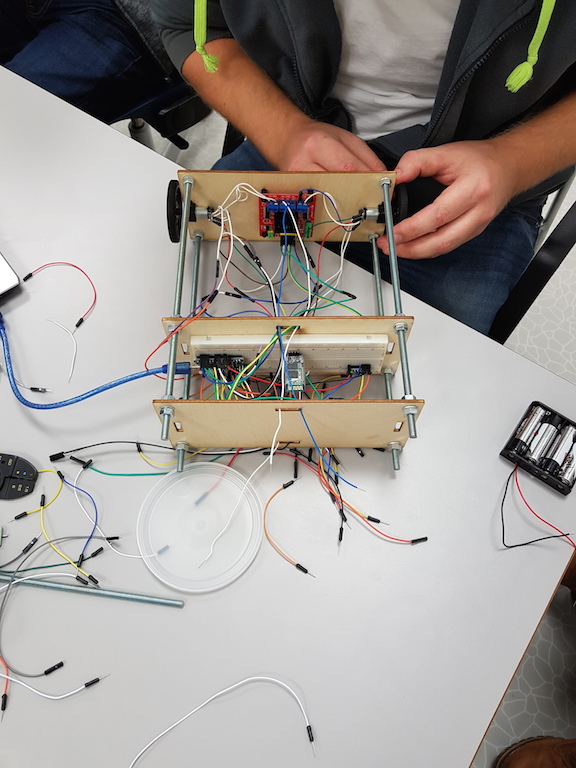
Kobling og testing må til! Når det er gjort må det kobles og testes igjen, og igjen, og igjen…
Noen nærbilder
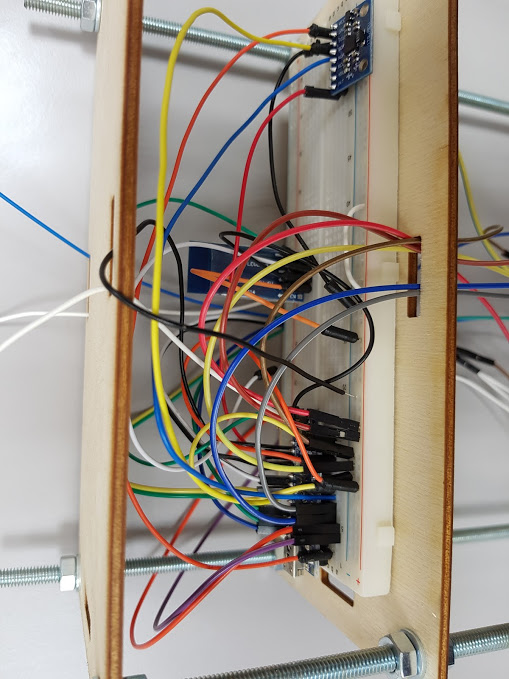
Mange koblinger å holde styr på, her gjelder det å holde tunga rett i munnen!
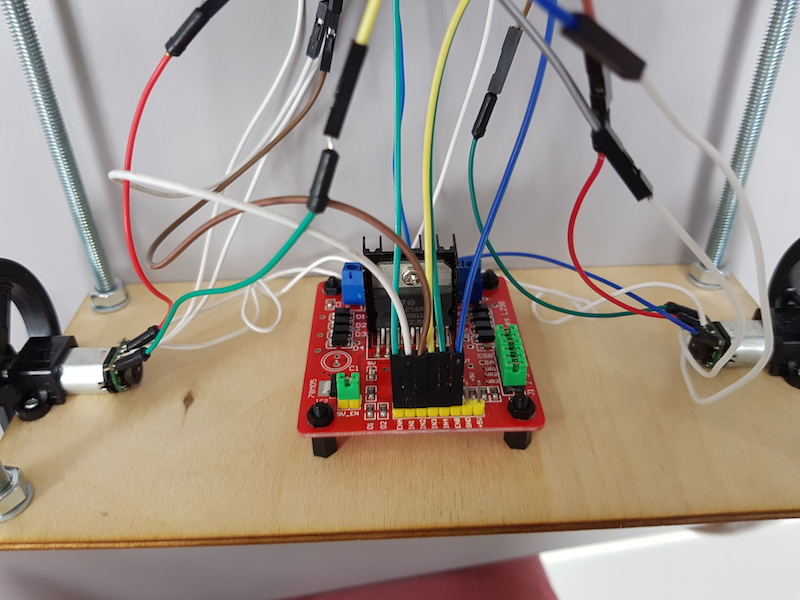
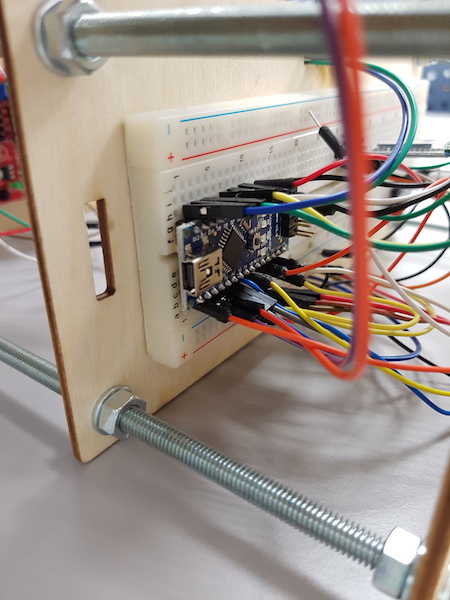
Komponenter og koblinger.
Neste steg
Det gjenstår å montere strømforsyning før vi kan begynne på den store utfordringen, nemlig å få den til å balansere på to hjul. Spenningen stiger, så det er bare å følge med…