Hei!
Her kommer en oppdatering om gruppen vår og hva vi holder på med 🙂
Gruppen:
Vi i gruppe to er en gjeng med seks ingeniørstudenter fra alle faglinjene.
Fra maskin: Andreas Andersen
Fra Data: Krystian Hoftun, Sandra Aakervik og Nina Heglund
Fra Elektro: Sølve Boldvik og Erik Godejord
Konsepter:
Gruppen startet arbeidet med en interessant idemyldring med stor variasjon i konseptene. De mest aktuelle konseptene vi kom frem til er;
Robotarm
Gyrostabilisert sykkel
CNC maskin
Vaffel-/pannekakemaskin
Underskriftsmaskin
Godteridispenser
Vi kom til slutt frem til at godteridispenser var det beste konseptet å jobbe videre med. Dette på grunn av vanskelighetsgrad samt gruppens sammensetting. En robotarm ville for eksempel blitt for mye kybernetikk, mens en underskriftsmaskin ville blitt for lite data.
Vårt system:
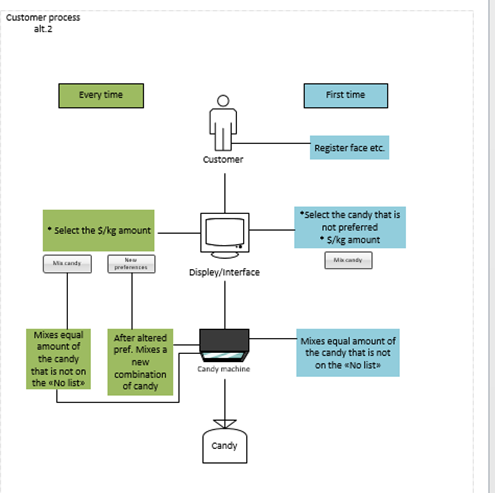
Etter beslutningen om at vi skulle gå videre med godteridispenser startet arbeidet med hvordan vi skulle løse problemstillingen. Vi kom sammen frem til at vi skal bruke ansiktsgjenkjenning slik systemet kan foreslå hvilket godteri kunden bør kjøpe basert på tidligere kjøp. Vi kikket også på løsninger for det mekaniske og det elektriske.
Det største problemet for den mekaniske delen er å slippe gjennom mykt godteri. Ingen av løsningene vi kom opp med håndterer mykt godteri på en god måte. Ett alternativ ville vært om godteriet lå i små poser, men dette virker usannsynlig å få til. Ett annet problem er at godteri kommer i forskjellig størrelse noe som kan være problematisk for de fleste konseptene våre. På bakgrunn av dette kom gruppen frem til å jobbe videre med en løsning som kun har en bevegelig del formet som en vifte (nederst til venstre på bildet). Gummigodteri vil fortsatt være problematisk, men størrelsen på godteriet kan variere.
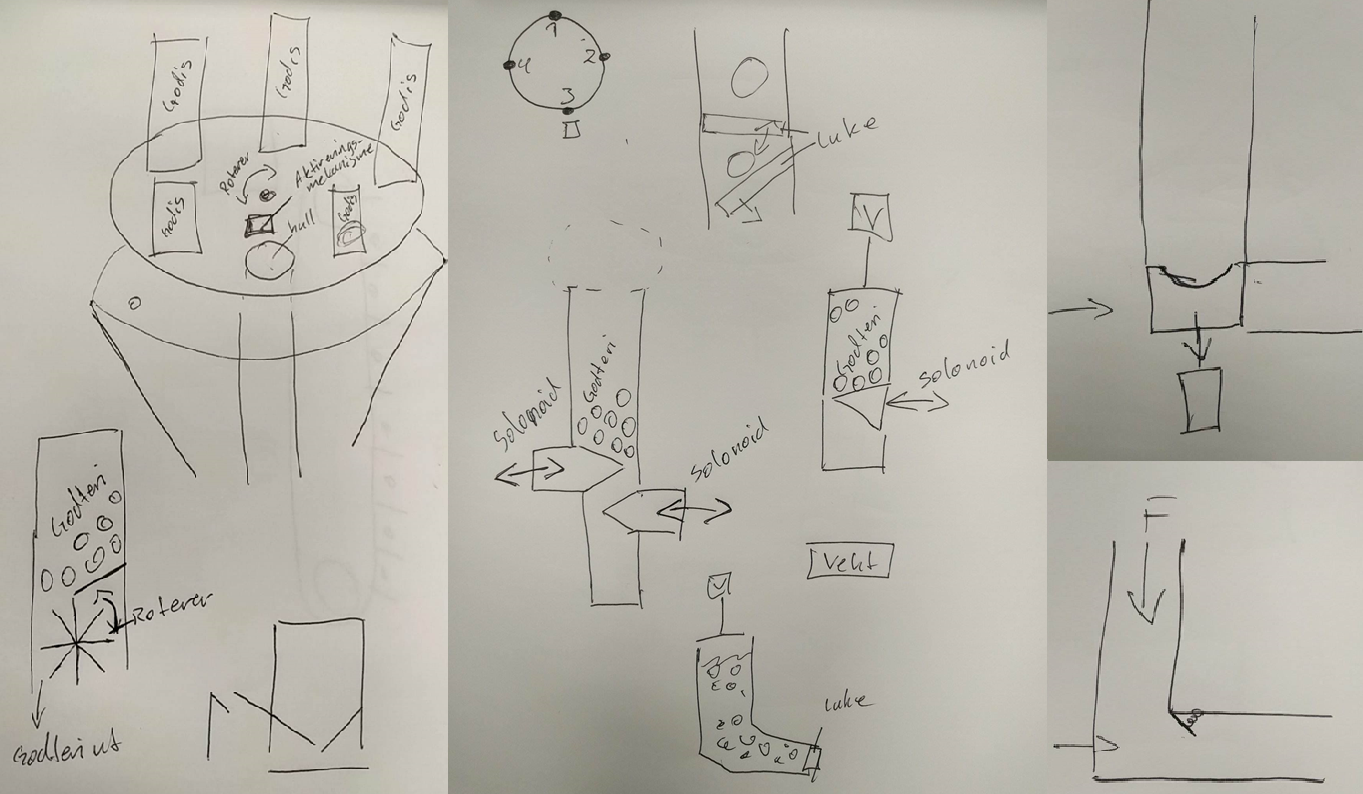
På den elektriske delen fant gruppen ut at det er gunstig å bruke en Arduino til å styre motorer og innhente informasjon fra sensorer. Arduinoen vil fungere som en slave for styreenheten som kommuniserer med kunden og bestemmer hvilken type og hvor mye godteri som skal mates ut. For å drive matesystemet kan en steppermotor være aktuelt. Systemet trenger også en vekt for å måle hvor mye godteri som har kommet ut, samt sensorer som forteller hvor mye godteri som er igjen i hver av beholderne. Disse sensorene kan være lasere, infrarøde sensorer eller ultralydsensorer. Gruppen kom frem til at infrarøde sensorer er gunstige da de er enkle å bruke og ikke har synlig lys som kan virke distraherende.

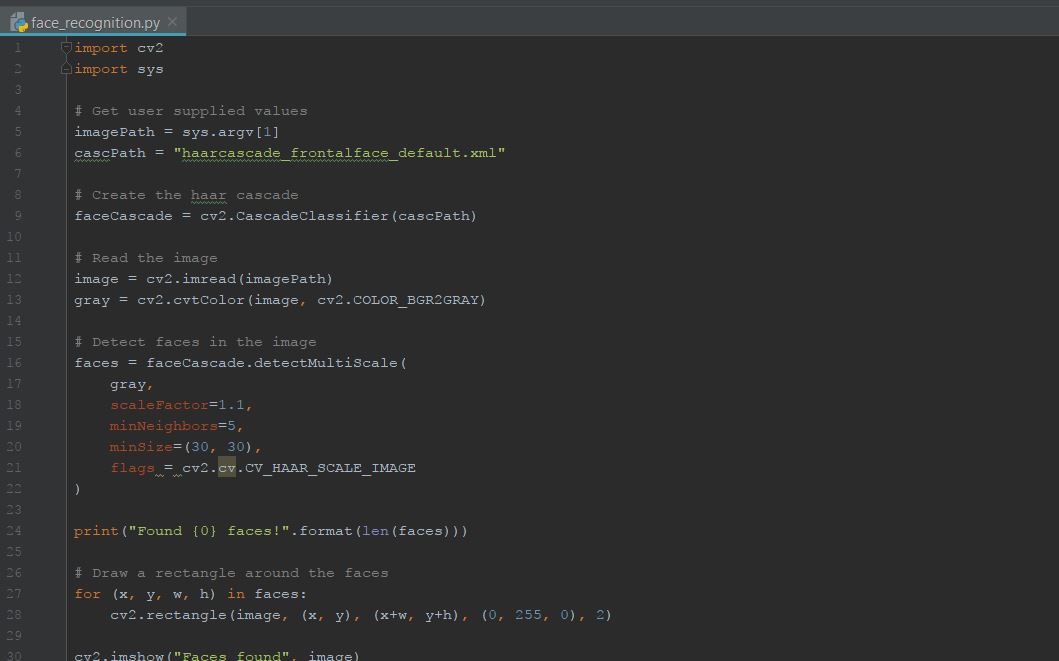
På software delen så har vi kartlagt hva vi trenger, og funnet ut at en database og en interface applikasjon, samt ansikt gjenkjenning og sorteringmekanisme må være på plass. Det er utarbeidet UML skisser og koden til ansikt gjenkjenningen er igang. Under ser dere utdrag av prosessen.
Videre fokuserer gruppen på å sette sammen en prototype med de valgte konseptene.