Progress:
Mechanical / Arduino:
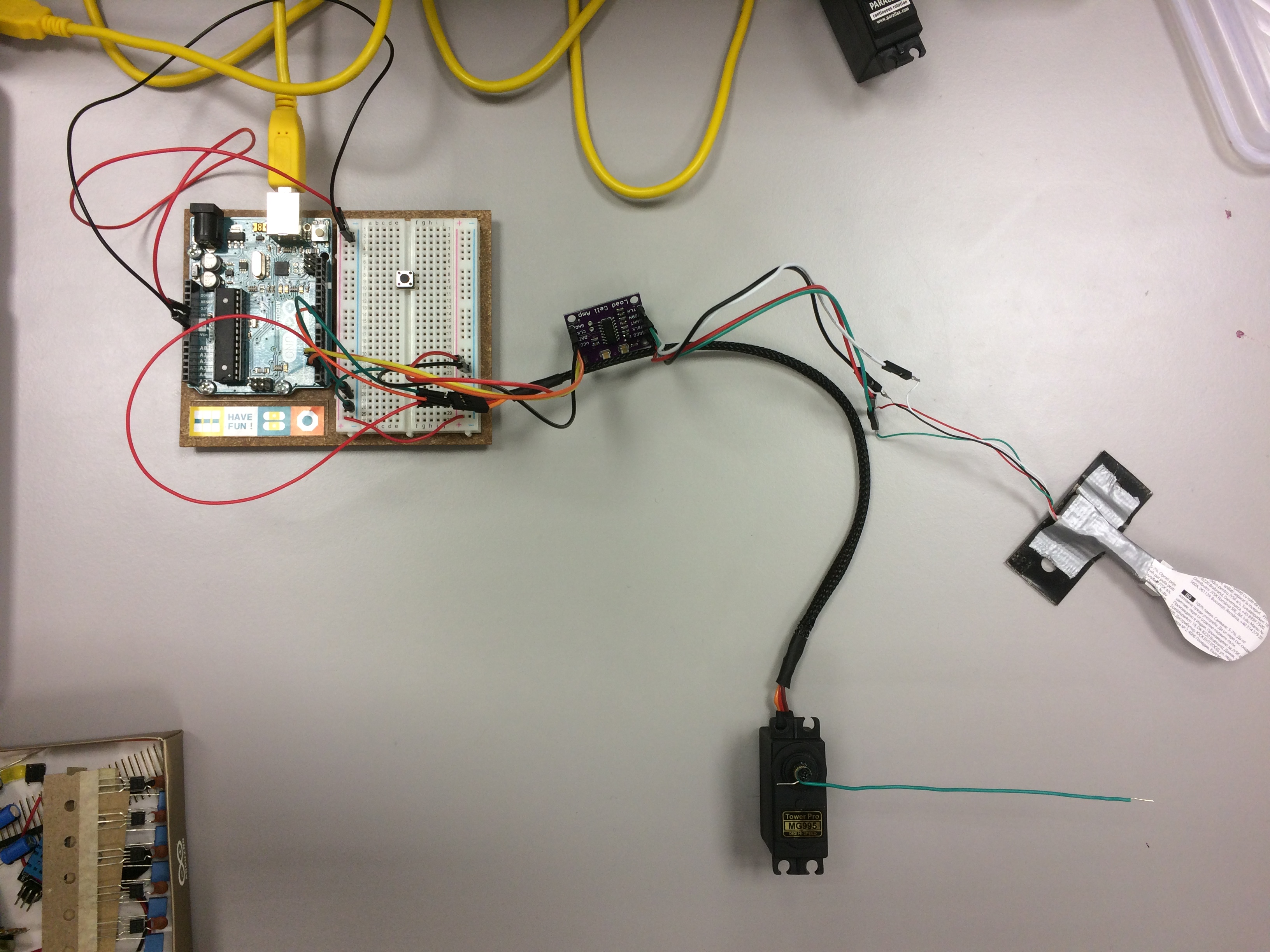
We got the servomotor to move as we want it. As soon as button is pushed, the motor starts moving in steps of on degree, after every degree it will check the connected load cell if a certain weight is reached. If so the motor sets back to zero.
This mechanism will push out the toothpaste out of a ourself designed cylinder. The required parts such as the pushrod, piston, cylinder and connector to the motor are designed in solid works (Youp). They are currently getting 3D printed. See following update.
Electrical:
We decided to use a power bank to supply the Arduino and out of it the motors. To not drain the power bank with the motors not even running we decided to add a relay to the circuit. Through the pushbutton the relay will close and the motors will connect.
This gives us the benefit of longer operating hours.