I dette innlegget forklarer vi de ulike komponentene og valgene vi har gjort i forbindelse med dem.
Dørlås:
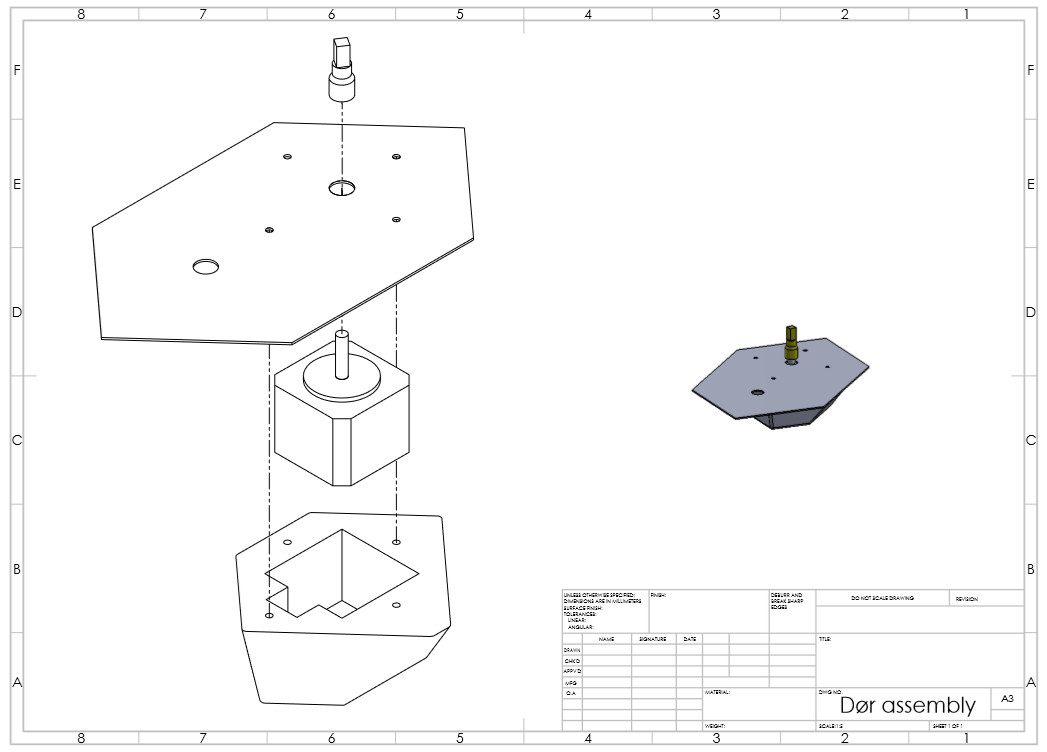
Systemet vårt skal kunne låse opp og igjen en dør. For å få til dette valgte vi å montere akselen til en stepper motor rett på akselen til låsen, slik at døren kan låses opp og igjen ved å styre steppermotoren. Motoren dekkes av en 3D-printet boks, valget av denne forklares i et avsnitt lenger ned. Mellom boksen og døra har vi en metallplate. Den har stort areal i forhold til tykkelse. Vi valgte derfor å lage den av stål for at den skal tåle eventuelle belastninger. Den er konstruert slik at den stikker ut fra den ene siden av dørbladet og dermed dekker låsemekanismen. Dette er gjort som et bevisst valg for å forhindre muligheten til å skjære over låseboltene.
Designet på døråpneren er svært enkelt, dette har to grunner. Den ene er at vi ønsket å gjøre det så enkelt som mulig, uten mange bevegelige komponenter. Dette er fordi systemet skal stå ute, og er da svært utsatt for varierte temperaturer som kan føre til tilfrossing i små deler. Derfor er motoren koblet direkte til låsekassen med en erstattning som nøkkel (Nøkkelbolt).
Det andre valget som avgjorde et enkelt design, var at man skal kunne montere låsesystemet direkte på en eksisterende dør, uten store inngrep i dørbladet eller karmen.
Materialvalget er som nevnt ovenfor, to-delt. Dette ble gjort bevisst, da vi ønsket styrke i den overflaten som skulle beskytte låsebolten, og lavere vekt i resten av strukturen. Fasongen har mye ulike flater og grader, noe som hadde ført til høy kostnad og dårlig materialbruk om vi hadde valgt å frese den ut av et helt stykke.
En ting vi ikke fikk gjennomført, var overføringen av strøm og signaler til låsesystemet uten ledning. Dette var tenkt at skulle gjøres gjennom låsekassen og inn til dørkarmen ved hjelp av slepekontakter. Grunnen til slepekontakter og ikke batteri, er at man slipper at døren ved et uhell gå tom for strøm og dermed miste tilgang til huset.
Ved å velge denne løsningen, vil døren miste spenning når den er åpen, men dette har ingen betydning, da låsesystemet kun trenger strøm når døren er lukket.
Vindusåpner:
Vi vil ha en innretning som er i stand til å åpne og lukke et vindu. Dette systemet drives av en steppermotor som styres av en arduino. Under utviklingen av vindusåpneren var det en del praktiske ting vi måtte ta hensyn til. Under beskriver vi hvorfor det ene designet er valgt fremfor det andre.
Første del av utviklingsprossesen gikk ut på å velge løsning på hvrdan vinduet skulle åpnes. Vi gikk igjennom fordeler og ulemper for de forskjellige typene. Deriblant tannstag, aktuator og et skrue-design. Vi valgte til slutt og gå for skrue-designet da denne løsninngen betyr at motoren ikke trenger å holde igjen vinduet når det er åpent. All vekten hviler da på gjengene til staget, slik at motoren ikke trenger å stå med spenning kontinuerlig.
Første design, vindusåpner:
Dette designet ble laget med tanke på styrke. Motoren vi først valgte var ganske svak, men det skulle i teorien gå om vi giret den om. Dette ville da føre til at den fysiske størrelsen kunne være litt mindre til sammenligning med en større motor. Vi fullførte designet og monterte hele systemet, som vist på bildet under. Designet fungere som ønsket, men en effekt vi ikke hadde tatt i beregning var at siden vi endret utveksling på motoren, hadde vi senket hastigheten så mye at vinduet brukte 10 min på å åpne seg. Dette førte til at vi måtte forkaste dette designet, selv om funksjonen var der.
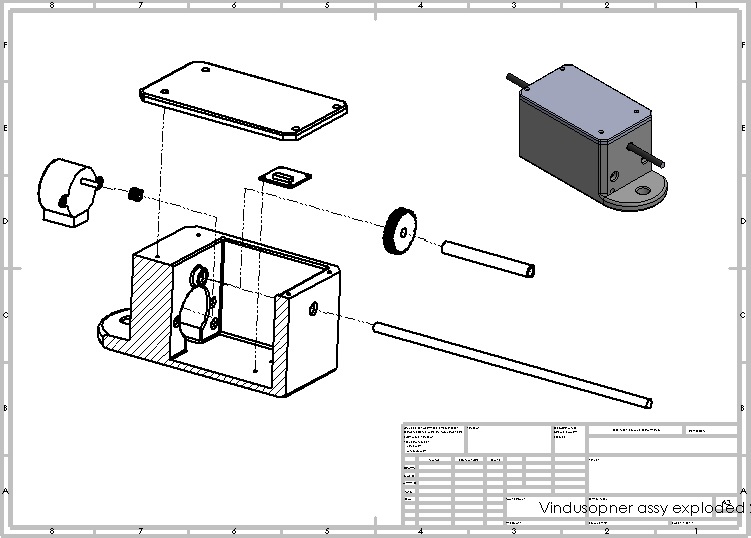
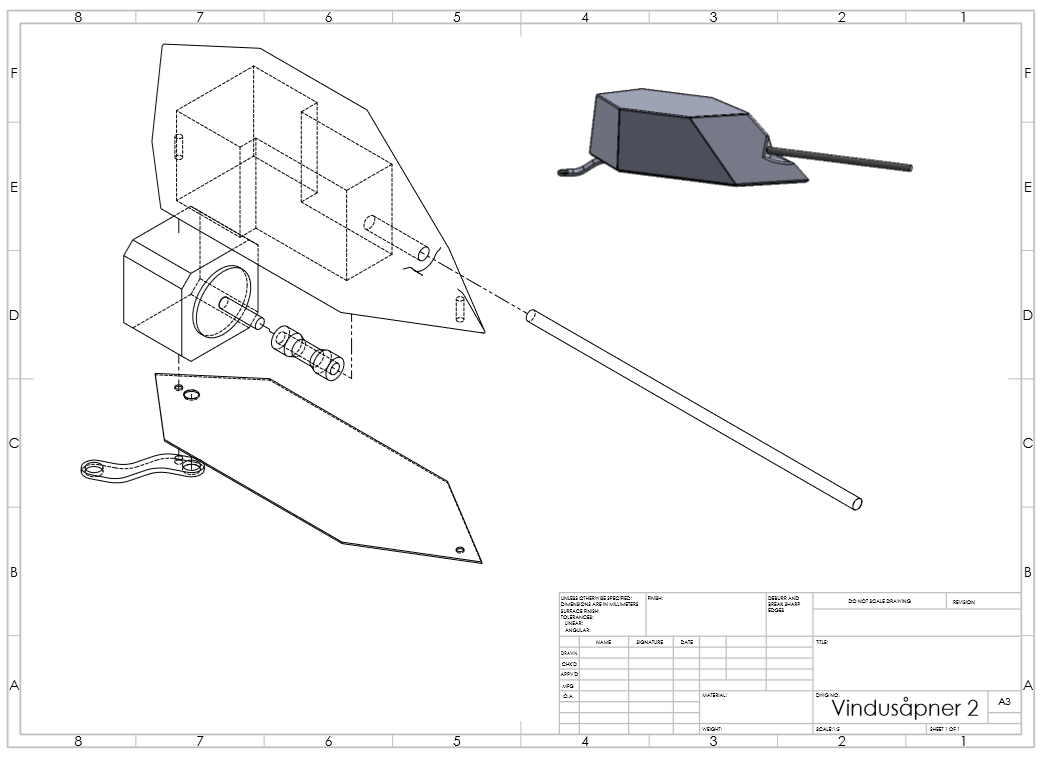
Final design, vindusåpner:
Dette designet ble valgt ut ifra erfaringene fra første design. Vi valgte her å bruke en større motor, med akselen koblet direkte på motoren med en overgang. Denne motoren (Nema 17) var kraftig nok til å ikke måtte gires ned, og har i tillegg større mulighet til å endre rotasjonshastighet. Designmessig, ble den laget for å matche de andre komponentene i systemet, for å skape en helhet.
Igjen er det valgt å 3D printe, dette på grunn av vekt og materialbruk. Denne ville også vært lite hensiktsmessig om man skulle frest det ut av en hel blokk aluminium. Bunndekselet er laget av platestål, da det både er robust, men også enkelt å jobbe med i en prototype-prosess. I neste revisjon av designet vil denne platen være aluminium, da denne er lettere.
Mottakeren i karmen er laget i vanlige vinkeljern, hvor det er boret og gjenget for gjengestangen. Dette er et midlertidig design, laget mtp å vise funksjonen. Dette skal i ettertid lages i lik stil som resten av komponentene slik at det står naturlig til resten av systemet design.
Hovedboks:
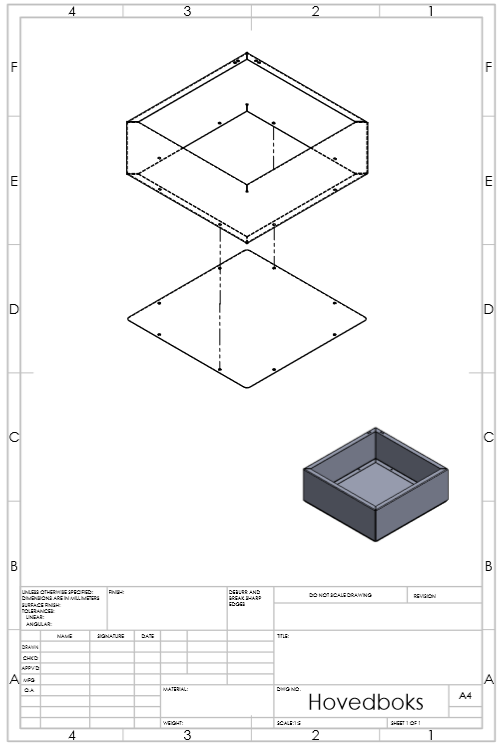
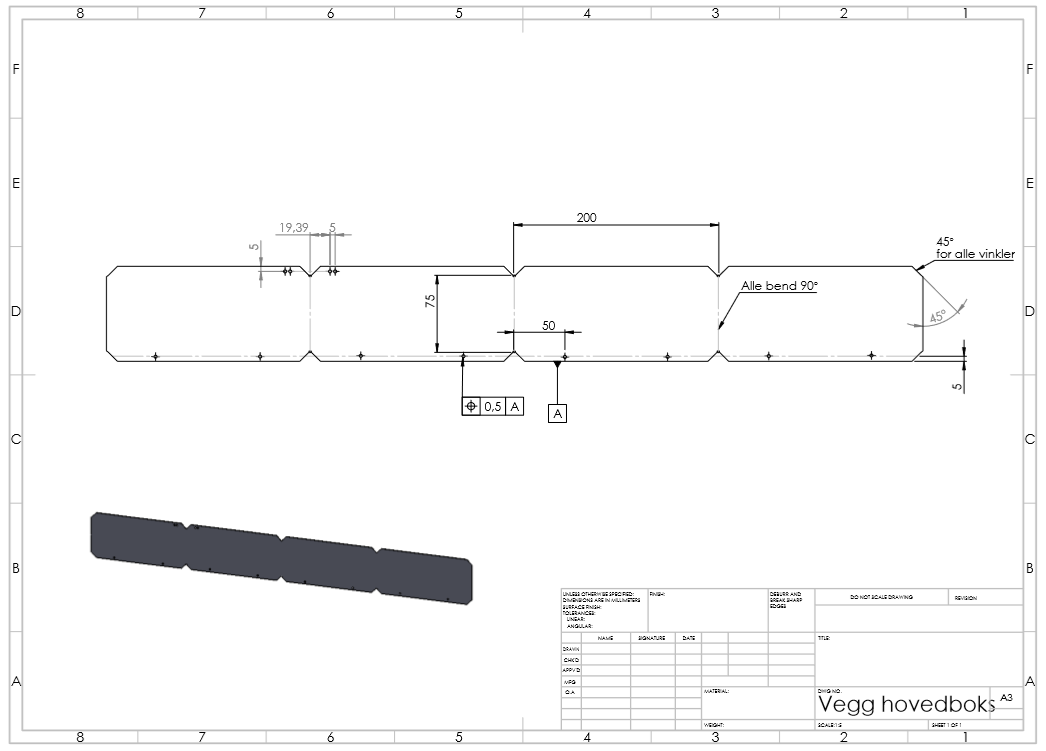
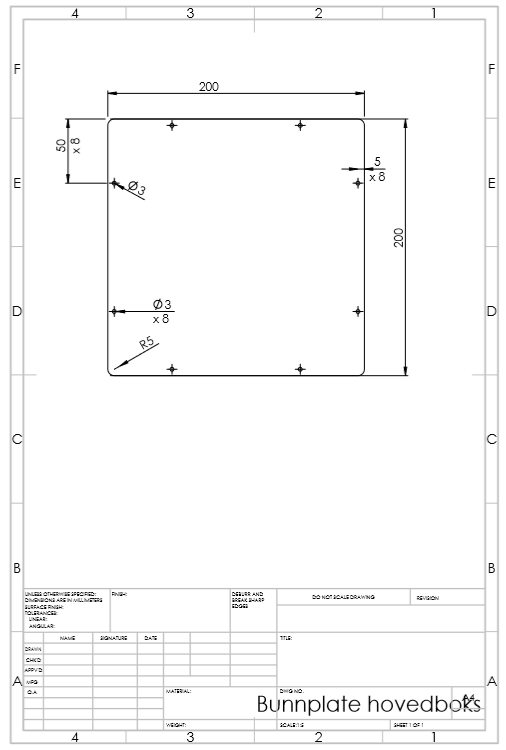
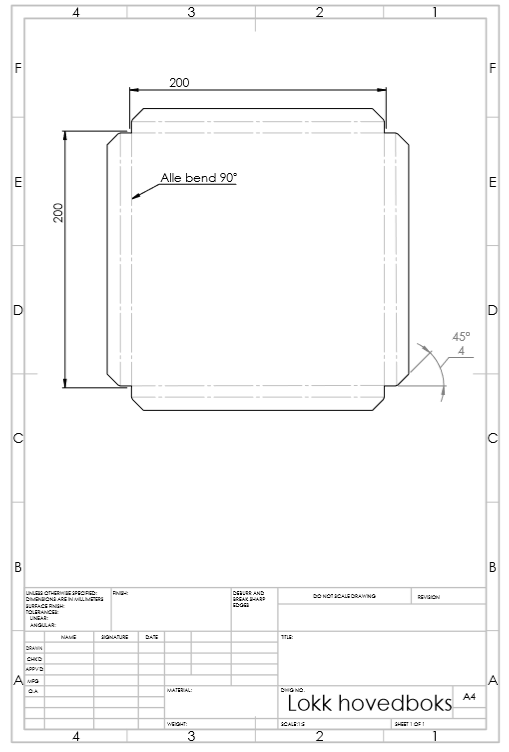
Hovedboksen er boksen som skal huse alle de viktigste komponentene, som arduino og Raspberry Pi. Vi lagde den av platestål. Dette lot oss lage en boks med stort volum samtidig som veggene kunne være tynne, slik at boksen ikke tar mer plass enn den må.
Under viser vi 2d tegningene, for bunnen, lokket og veggene. Veggene og lokket er brettet i henhold til hva som står på tegningene. Et unntak er lokket, der den ene kanten er brettet ned for å sikre mot inntrenging av ukjente legemer. Dette er den siden med hengsler, hvor mellomrommet ble større enn forventet. I neste revisjon vil dette tas hensyn til i tegninger.
Når systemet skal monteres i fullskala, er det ikke tenkt at pir og kamera skal plasseres på boksen, men på hver sin side av døren. Boksen er kun der for å forbinde de forskjellige sensorene.
Andre bokser:
Vi trengte bokser til å dekke mekanismene i dørlåsen og vindusåpneren, PIR detektor, Raspberry Pi kamera og RFID-RC522 brikkeleser. Vi valgte å 3D-printe (additiv tilvirkning) boksene til de ulike komponentene. Dette gjorde vi fordi det lot oss lage produkter med avansert geometri som ville vært vanskelig å tilvirke på noen annen måte, dermed fikk vi det designet vi ønsket. Boksene påføres heller ingen store belastninger, så de trengte ikke lages av sterkere materialer. Ved å velge 3D printing, får vi også større spillerom med tanke på designprosessen. Dette lot oss designe former, som ved tradisjonelle metoder ville kostet mye mer å tilvirke.
PIR boks 2D: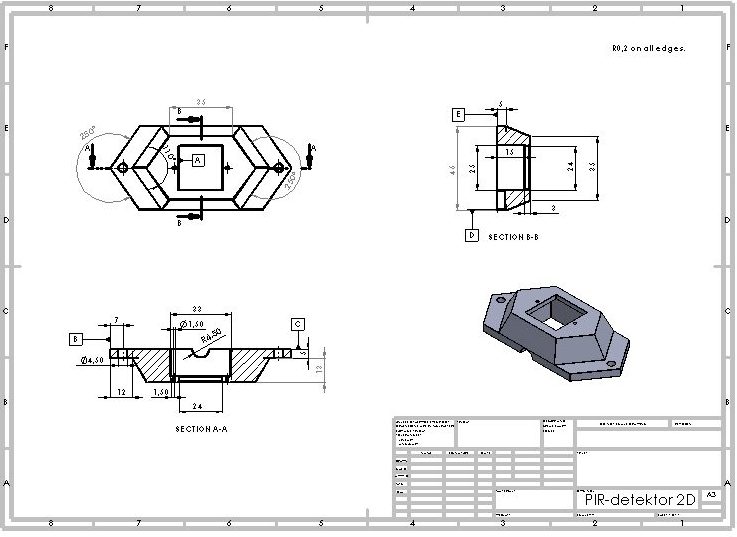
PIR boks exploded view: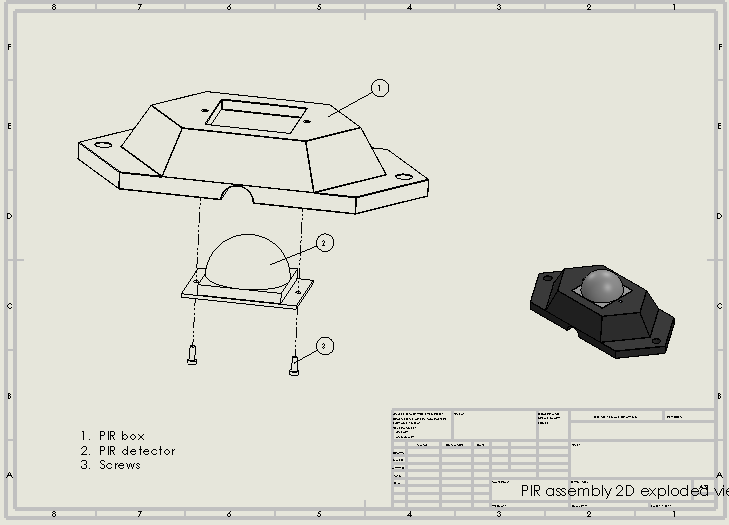
Kombinert PIR og kamera boks 2D: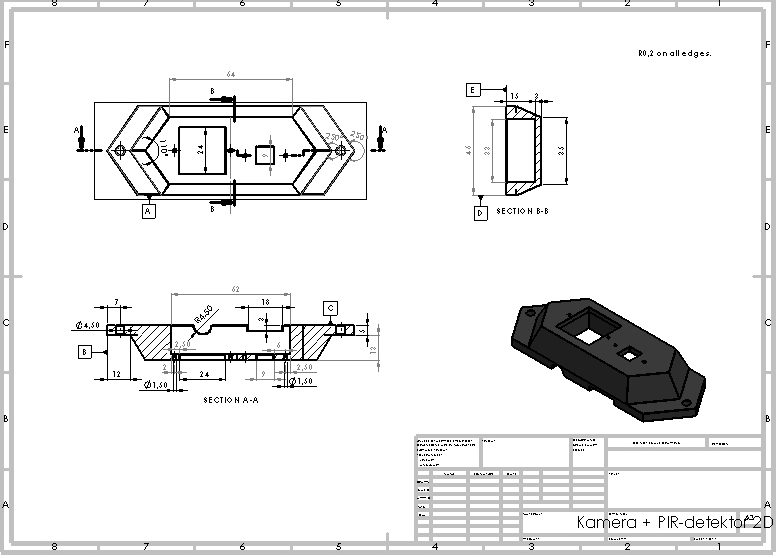
Kombinert PIR og kamera boks exploded view: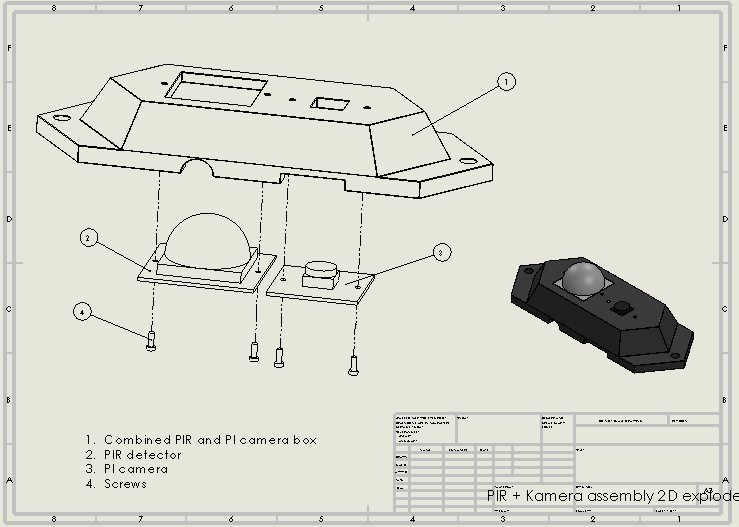
RFID-RC522 boks 2D: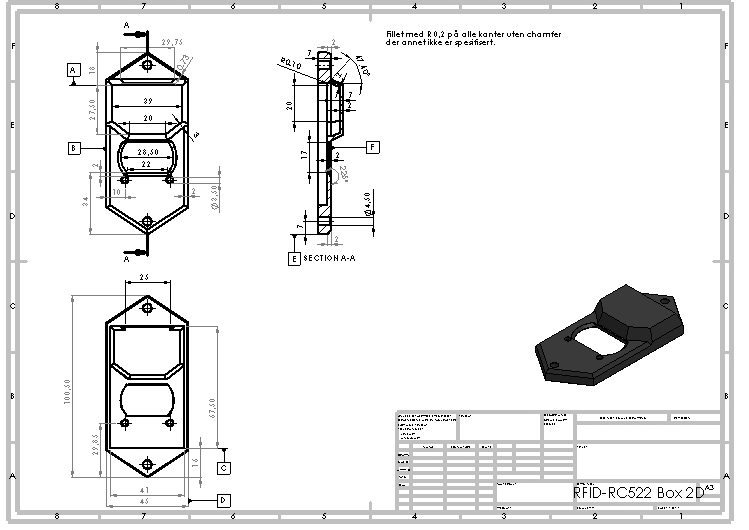
RFID-RC522 boks exploded view: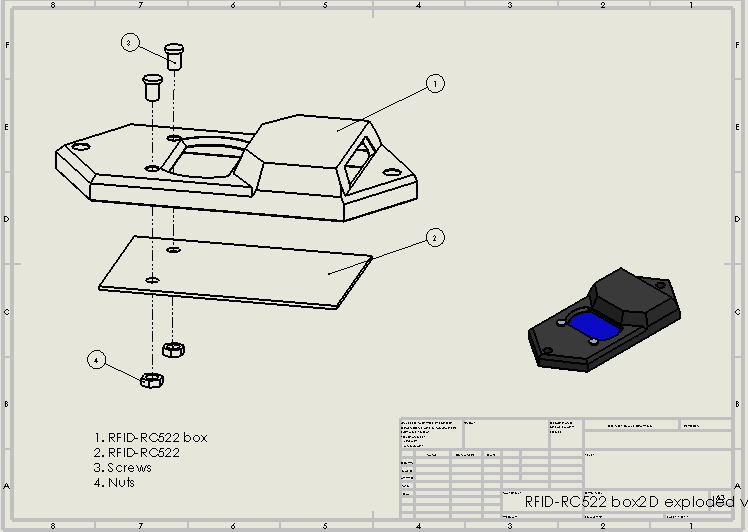
Vindu og dør:
Vi trengte en dør og et vindu for å demonstrere systemet vårt. Det mest realistiske ville da vært å teste det i et hus og montere det på eksisterende dør og vindu, men dette ville vært veldig upraktisk i forbindelse med dette prosjektet. Vi lagde de derfor selv. Begge er laget forenklet for å gjøre det lettere for oss å frakte systemet rundt på skolen. Design og mål er ikke viktig, siden systemet vårt skal kunne monteres på eksisterende dører og vinduer.