Wang
Last week, I established a connection between the micro:bit v2 and the joystick. This week, I configured the Bluetooth communication to transmit joystick data to a receiver micro:bit v2.
The system is designed to pair automatically upon startup, the receiver scans for a specific identifier. Simultaneously, the controller broadcasts its signal immediately upon being powered on, establishing an instant connection.
Additionally, I installed 4 LEDs to simulate the wheels of the car. I implemented a simple control logic where moving the joystick along a specific axis activates the corresponding LED. Consequently, moving the joystick diagonally activates two LEDs simultaneously.
Oskaras
So following last weeks motor changes, i was still not satisfied. The video under is a poor attempt at capturing the problem and makes it look very subtle. in reality that little drag/hiccup that the wheel had made the driving unreliable. After tightening everything with proper tools and taking the wheel of from the frame i found that the problem was in fact the newly installed motor. So once again i went and got some more motors to test with and finally found one that eliminated all of the problems that i had. So the car now drives reliably, and most importantly for now there are no hardware issues. Eliminating those also made me realize that my motor driver library worked also, so that was fun. i have now implemented some functions for turning, glide to the sides and rotation.
Now that the car has become more mobile, the power supply has become a bit annoying. I know that i have options for stronger batteries so for the time being I’ll mange. My next goal is implementing serial communication. Whether it’s pure Serial using Zephyr’s Uart or I2C remains to be decided. This is to connect the micro bit(main control unit for the car) to the raspberry pi(the brains). Another thing that i need to do is flesh out my driver library so that i would accept continues data from the controller that wang is implementing, and move the car accordingly.
Øivind
This weeks blogpost is short and missing a lot, since I still have trouble uploading and syncing between my phone, PC and YT and Vimeo. But when I resolve the issues, I will come back with the lost parts in a longer blogpost when im over two exams next week.
Thr Rover has gone through a lot of transformations and I will show it when I get even more done.
I want to print other shafts for proper Moon-Rover wheels. But that must be confirmed by the whole group. I will double the setup on motor-drivers and wheels if I find time, so they can choose. It is a secondary task and probably I will not since it will create lots of trouble in the control of the Rovers dynamic through varying friction on the wheels.
Before I go with a good and stable telescope rod for the RPI camera, I want to show my first idea of a telescope rod. Growing up watching MacGyver this might make most of you wonder WTH, still I’m not ashamed. This is the best feature I come up with from scrapped parts. Keep in mind I severed my favorite(!) tape-measure to make this. The curtain rod from my son’s bedroom was already replaced after changing his window this fall. I will, actually might use it, but probably not, as that would disappoint Richard, by not doing things “right”, I think?
Video shows how a servo that was meant to lift the rod 90 degrees (rods will be shorter, about 20 cm((same as Rover)) and extend to just under 40cm) and with a proper housing to guide the spool and a stepper/DC-motor, the tension in the tape measure with some guiding is more than enough to lift the rod with the camera at 2×20 cm (It’s 2x40cm in the vid). But it is still not by far failure-safe and needs to be sanded, point-soldered and painted for aesthetics. Do you get the idea anyways? Could not scrap the idea without documenting it first.
Watch it if you want:
After watching the entire collection of week 12’s blogposts I will reformulate myself and also invite other groups to co-operate in solder-jobs. For those who have time and are willing after just contact me and we can schedule time. I see others might use protoboards, as has been my only option since none of the PCB-group guys or gals invited me to PCB-jobs. I’m open to collaboration, can share my small amount of experience, and hopefully harvest some from others.
My idea for the main boards is one-sided perforated boards, in addition to smaller two-sided protoboards tailored for my needs.
Today I’m thankful I live alone with my son and have only to answer to myself (when at home), because I usually sit by the stove when soldering because of the good light and fan right above. When assembling the new battery pack after I broke the old BMS, I misplaced the battery pack with open leads. It connected two leads at each side of the metal rim besides the cooking plates and straight up welded away. This was a scary situation with more sparks than I’m comfortable with all other days than New Years Eve.
Look!

These are deep cavities, not something I can wash off. Take care out there!
The battery pack has haunted me for a long time. Third or fourth time I emphasize it in this blog? I can understand that it’s boring, but I have had to use much time on the power-supply with the failing I’ve been through.
And I’m not very trustful about the BMS, but everything seems to be fine. I skipped mounting double leads (power and balance) bypassing the BMS, in case I need to use a balance-charger, in the scenario that this setup should fail. I have a current sensor to monitor the charging, but since I have no Arduino now, I wait a bit with it or just use a charger module as shown in the video.
I hope I’m done with this part now, this time I will secure the temperature sensor better before I tape the pack again.
I’ve managed to do quite a lot of work with the Rover, more laser-cut parts got handed to me from Richard. Which must mean my drawings were accepted.
I will focus on upcoming exams this week and then decide for motors for the drill-rig since my first option seems to be a lot of job to get to work safely and stable. Brushed DC motors is way easier to implement.
I might skip next weeks blogpost and come back stronger in two weeks!
Take care in these dark times!
Zardasht
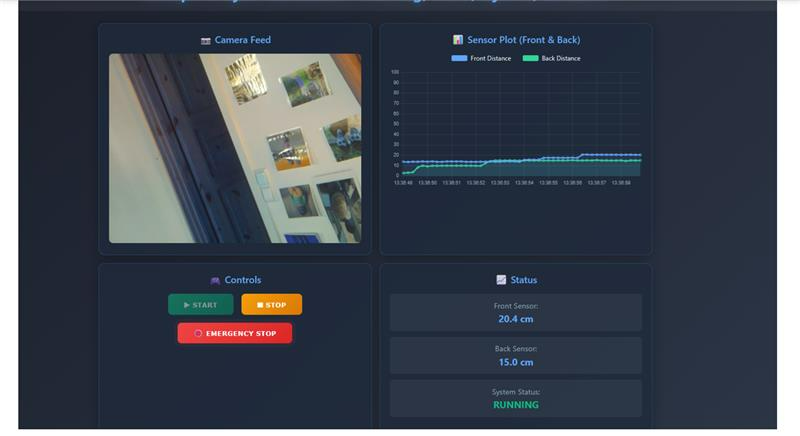
Although it has been challenging, this week has been incredibly educational and rewarding. I’ve spent more than three hours each day improving the dashboard for the robot car, focusing on both functionality and visual clarity. The camera feed was integrated more smoothly, and the sensor plots for front and back were adjusted to display data more accurately over time. I also enhanced the status display to provide clearer feedback on the system’s condition and optimized the control buttons for faster response. In addition, I worked on connecting the Raspberry Pi to the micro:bit via serial communication, allowing the car to be controlled based on data retrieved from external APIs. This gave me valuable insight into how real-time data, user interfaces, and hardware can interact in smart system design. Through testing, troubleshooting, and iteration, I’ve developed both technical skills and a deeper understanding of how such systems are built and secured
Henning
Hello!
This week was a bit of a struggle for me! Ended the weekend before (sunday) in a car crash! Which was pretty brutal, but luckily we all came out of it fine. The after effect had me pretty rattled and shaky for this week.
Here is a picture of the car for reference:

I was still able to try and work on my code in order to make my AI draw more accurately. This is still a fault and i couldnt find the right implementation for this yet. So, hopefully next week i can produce a working drawing machine for the mazes.
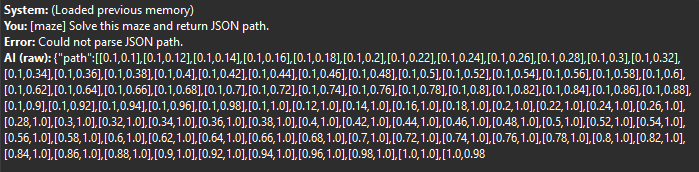
As the picture illustrates, the AI can give back the coordinates of where it wants to draw, but im struggling to make it work well in terms with the drawing tool. For some reason it doesnt want to read the Json draw method and completely skips it. As the error implies: “Could not parse JSON path”. I am working on correcting this error as it is the final pointer to the AI, and then i can merge it with the PI.