Group name: AstroTrack
Whats up guys, we are group 5, and this is our very first blog post. We are five computer engineering students. Since we don’t have mechanical/electrical specialists on the team, we’re building on an off‑the‑shelf electric car platform with sensors and a camera, so we can focus on software, AI, and system integration.
Group members:
August Henninen – Software
Sander Pedersen – Software
Nicolay Skavås – Software
Sondre Bjerve – Software
Oliver Wåden – Software
We have not yet assigned specific roles and responsibilities. We will discuss this further down the road.
Tools:
Code management: Github
Drawings and diagrams: draw.io
Requirement analysis using NASA guidelines (ABC prioritization)
Communication & files: Microsoft Teams
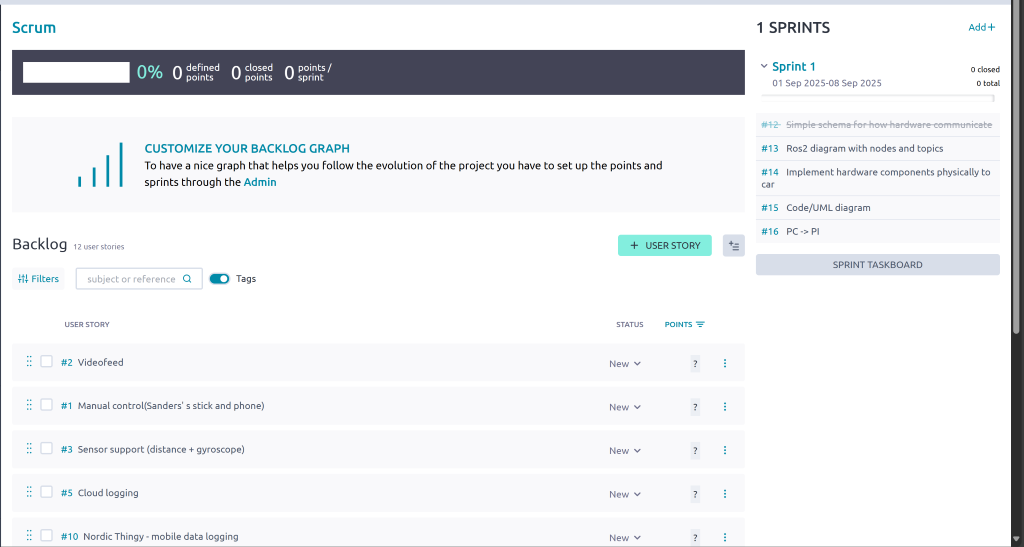
Project management: Taiga.io (Kanban & Scrum)
Project thesis:
The theme is space. Our starting point is a small off‑the‑shelf electric car. Our ambition is to gradually transform it into an autonomous rover. We will learn and integrate concepts from AI, control systems, real‑time software, and human‑in‑the‑loop interfaces. The end goal is an autonomous rover with live telemetry and command capability through a GUI.
First week progress:
Week 1: First week started with teambuilding and a get together. We began by establishing a solid foundation for collaboration. A group contract was created and signed by all team members, outlining expectations, responsibilities, and communication routines. We also conducted a requirements analysis, where we categorized system needs into A, B, and C priorities—ensuring a clear structure for what was critical, desirable, and optional. This helped align the team’s focus and set realistic goals for the project timeline.
Requirements
System
A
- Read, display, and log data in real time.
- Communication between raspberry Pi, Micro:bit and Computer
B
- Store data locally and transmit to a database.
- Map terrain
C
- Display map in GUI
Rover
A
- Drive autonomously
- Drive with joystick/manual control
- Read sensors: temperature, gyroscope, pressure, humidity
- Detect and avoid obstacles
- Record live video and send data in real time
B
- Optimize route for shortest and safest path
- Stop automatically on critical failure
- Receive and execute remote commands
C
- Pick up soil sample
GUI
A
- Display real-time data, live video, sensor info, and alerts
- Allow manual override and mission parameter uploads
- Send commands to the car
B
- Log user interactions and commands
C
- Require user authentication.
Next week:
[] Talk to Steven about requirements and complexity.
- Vision forming, problem exploration, research technology and equipment
- Requirement analysis (See NASA guidelines for good requirement formulation)
- ABC prioritization of identified requirements (think of a system how to classify)
- Setup team structure, roles, schedule meetings, basic collaboration rules
- Setup team infrastructure
- Setup individual software/hardware infrastructure
- Component overview, flow/interaction charts, entity-relation diagrams of first system design
- Setup Gantt chart with planning, Kanban board
- Start mapping out how we will make the car autonomous
- Identify the components the car consists of
August:
I made a scrum/kanban room. I looked at how to run a scrum. Looked at different modules and sensors. Looked into Ros2 and github. I tried som simple scripts with the microBit. I’ve deep dived into sensors, microprocessors and code environment.
Sondre:
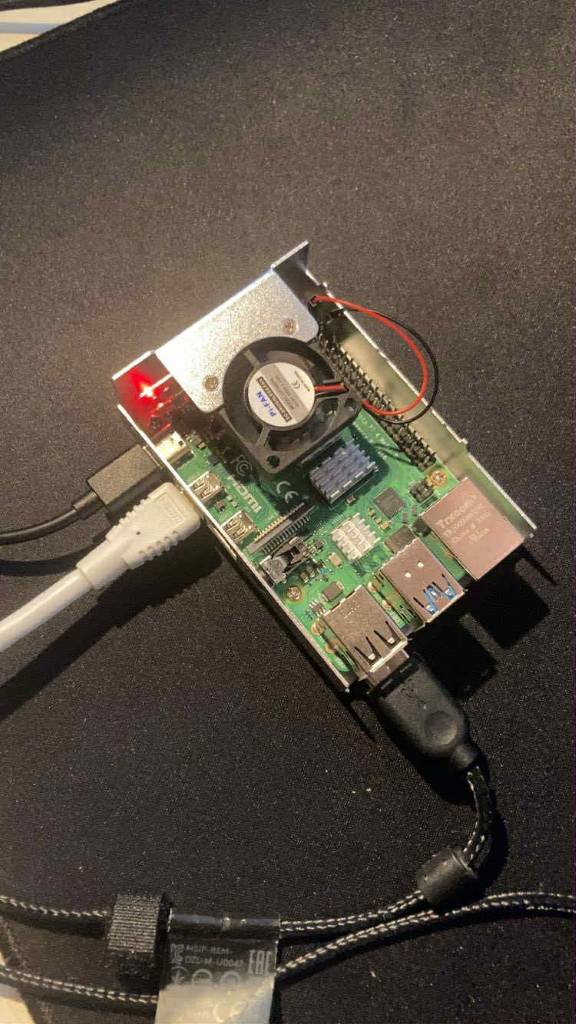
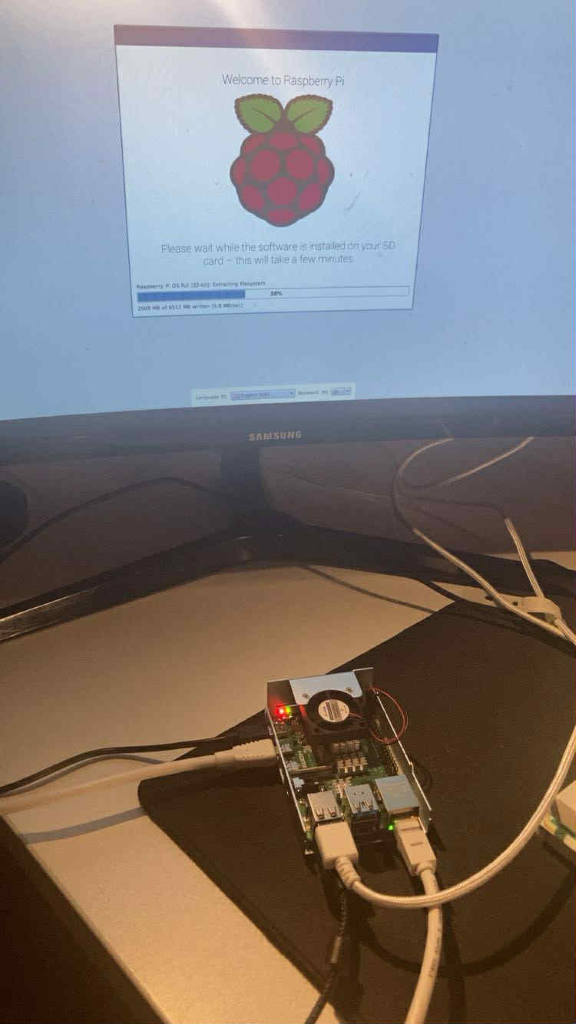
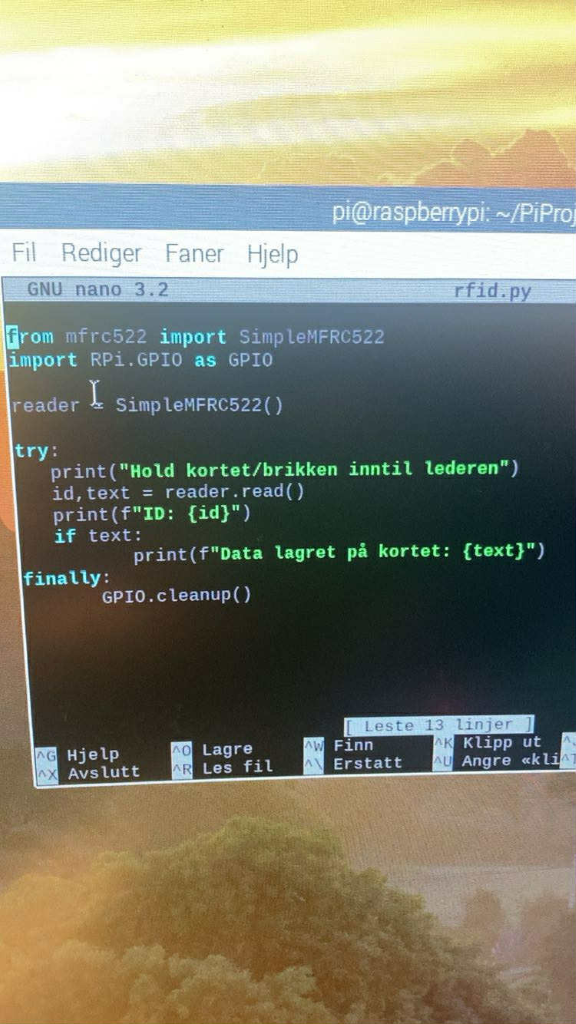
This week we divided some tasks among ourselves to explore further during the week. Since I have a Raspberry Pi and we are going to use it in the project, I spent the week downloading the necessary software and getting more familiar with how it works, as I haven’t used a Pi or anything similar before. Since we haven’t yet acquired the modules we plan to use, I tried connecting the Pi to an RFID module from the Arduino kit from our first year to test how the Pi communicates with a module.
I also started looking into OpenCV, which we plan to use with the camera module.
We are both using new and old platforms/software during the project such as Git/Github, ROS2, Visual Code and more. So i also renewed and gained knowledge of these platforms/softwares.
Sander:
Started looking into tools for the development process. Setting up the project repository in Github. From my experience ROS 2 (Robot Operating System 2) is the most used for projects like the astroTrack, where the modular nature of ROS 2 is benefical.
Started by choosing the ROS 2 Humble version, this is the most stable ROS 2 since it was released in 2022. The EOL is 2027, which is sufficent for our project.
Development environment:
Ubuntu 22.04 LTS (VM or dualboot)
ROS 2 Humble
Visual Studio Code(with Extensions)
Rviz
Started setting up workspace building the first ROS packages in the project, testing ROS 2, creating an environment for building microBit code, testing the off-the-shelf rover and trying to understand how it was built. Having some issues with only one motor working. Did some simple serial communication between my computer and microBit to get familiar with the microBit, researching and testing some concepts.
Oliver:
This week we were supposed to look at some software and modules we would be using. I started by looking into software such as ROS2 and refreshed my knowledge of Git, since it’s been a while since I last used it. I also looked into the power requirements so that we can get an idea of how long the car will be able to operate and whether we will need more power.
Nicolay:
I took some look at the softwares and modules that we are planning to use in our project and downloaded the seful tools. I havent used ROS2 before, so i tried to start learning that and looked up how it works, aswell as looking into Github and all the different commands that can be useful in our project. I also started with the blogpost for week 1 and 2, the common part, and later reviewed the whole blog to make sure it looked well written.