Date: 17.10.2019 – 24.10.2019
We had some issues with the Arduino board as well, especially with ROSSerial. It suddenly stopped working and it took a while to figure out what really happened. We realised that if we open the serial post device using GNU screen, it will set the correct settings for the Arduino, which indicates that there is something funky going on with the driver or something related to that. Either way it has been successfully ported and now functions as expected using a custom solution that we came up with.
We realised another problem as well, which is the fact that the flight controller of our drone does not support any external API. This means that we might encounter some difficulties with the communication between our flight controller and the Jetson Nano, along with our ROS environment. We need the “autonomous” part of our project to work, which means that we depend on some sort of communication, so that our flight controller can send data to our single-board computer, in order to compute for further actions.
Last week we tried to install a WiFi adapter for the single-board computer, but it did not work due to unsupported drivers. We have purchased a new adapter from Netgear, which seems to be supported in Linux operating systems. We finally got this up and running and it works well within our range. The wireless connectivity is crucial in order to achieve a communication link between our devices, which obviously is an important part of the project, due to the fact that our drone is supposed to fly in the air and therefore needs to be wireless in terms of network connectivity.
This week a couple of us have been trying to set up the flight controller to work with the DJI motors. For this we used firmware for Naza v2 flight controller and connected it to a HiTec Flas7 RC-controller. We encountered a few different problems, such as not getting the Flash7 controller properly calibrated and struggled a bit with the arming for making it fly-ready. We spent many hours trying to calibrate the controller, but it would not work properly. After watching a lot of videos on YouTube and getting some help from Jan Dyre, we finally got the sticks aligned correctly, and it seems to work at least better now. The next step is to fully assemble our drone, so we can attach the components and then re-calibrate the RC controller to get the sticks properly aligned. This is something we are hoping to achieve by the next sprint, as we are waiting for some 3D-print models first.
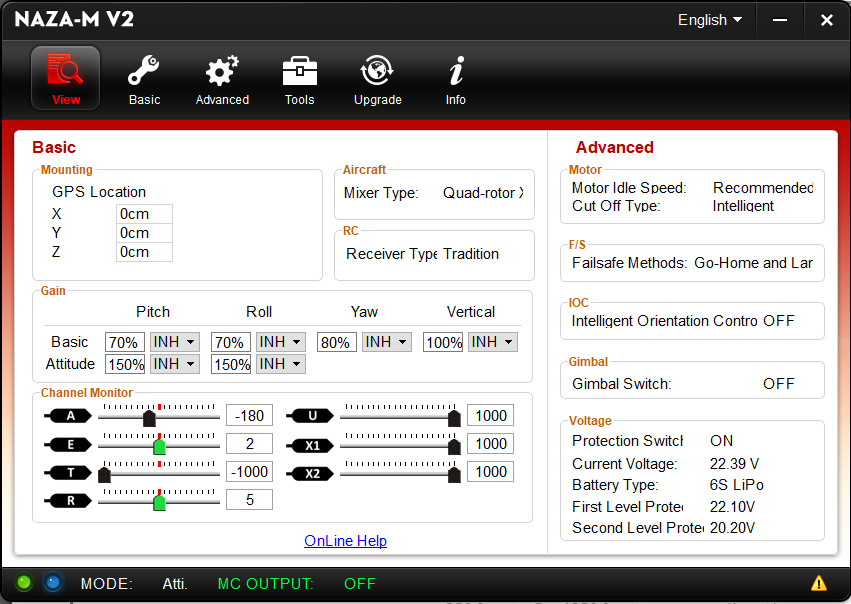
The picture above shows one of the settings for the flight controller. This program will make it easier for us to control the flight controller and to calibrate the components to work properly.
When it comes to the mechanical part, we have been fixing issues when it comes to mounting holes. Our physical model has helped us a lot in order to find mistakes in the design. We have also been cutting out the holes that we need in the arms of the drone and making the arms the correct length by cutting it with a saw. We were not sure if the saw would be able to cut the carbon fiber, but we had no problems in doing so. We had to talk to Kåre to make sure we did the process of cutting and making holes in the carbon fiber correctly. We have a few more parts which need to be cutted but with a lot more precision, so until the deadline of the next sprint, we are going to be focusing on making parts in Solidworks which we can 3D print and use as templates when we are going to make holes in parts which have no room for error.
This has been a quite busy week due to home exams and other individual work. We have tried to do as much as possible at home and we continuously discuss project-related topics in our group chat to keep things in check. We have planned everything for the next sprint and Richard is doing his best to print out our models as quick as possible. So we will hopefully have everything necessary in order to assemble the prototype, where we can continue the drone development.