Oppsumering
- Utstyrsliste
- 4 fire bladers propellere
- 4 Multistar Elite DC motorer
- 4 Electronic Speed Controller
- 4 Ultra Sonic sensorer
- Gyro – MPU 6050
- 9 Volts batteri
- 3C 11.1V batteri
- Arduino Uno
- Isopor
Produktet vi ønsket å skape skulle være et produkt med flest mulig bruksområder. Vi ville at det skulle kunne brukes i mange forskjellige situasjoner og av flest mulig. Derfor startet vi dette prosjektet med drøfting og diskusjon om hvordan vi ville utforme et produkt som dekket alle våre ønsker, og hva det skulle være. Gruppen gikk sammen til foreleserne og presenterte sine forslag slik at vi sammen med dem kunne være enige om et produkt som inkluderer våre ønsker og samtidig inneholde faglige krav. Produktet vi endte med å sette som utgangspunkt var en drone, med flere bruksområder og sensorer til å kunne reagere på omgivelser. Hovedmålet vårt var å bygge en drone som ville overstyre og kontrollere unna dersom en av sensorene oppdager hindringer.
En smart-drone burde være utstyrt med sensorer som kan beregne retningsbaner til objekter rundt, og kunne styre unna potensielle sammenstøt. En annen praktisk bruksmåte for å kunne bistå ved nødsituasjonen kan blant annet være at den kan styres ut til en person i nød, for eksempel fly ut med en redningsvest til en person i vannet. Droner kan være en fornuftig investering for privatpersoner som ønsker kameravinkler som vanligvis ville være uoppnåelig. På en slik måte kan man forvente at det i fremtiden vil bli plassert smarte droner over for eksempel sentrum i byer på standby for å ta imot oppdrag. Alt dette er forslag og bruksmåte vi så for oss.
Forventninger
Gruppens forventninger var å bygge en funksjonell drone med sensorer som kan overstyre brukeren til å unngå sammenstøt. Vi satt sammen en gruppe med fem håpefulle studenter, bestående av tre data-, en elektro-, og en maskinstudent. Med tverrfaglig kompetanse har gruppen tilrettelagt et solid grunnlag for at prosjektet skal være gjennomførbart. Ingen i gruppen har noen forkunnskaper om drone, gyrostabilisering eller avstandsmålere, derfor ser vi for oss et stort læringsutbytte ved gjennomføring. Gruppen forventer etter samtale med foreleserne at skole skal stille med flesteparten av nødvendige deler og komponenter, men er forbrett på å måtte kjøpe enkelte spesialtilpassede deler.
Studentene hadde delvis tidligere bekjentskap slik at forventningene til tverrfaglig samarbeid burde gå problemfritt. Vi regnet med å gjøre demokratiske beslutninger for å hele tiden holde gruppen samlet, og tilfredsstille flesteparten.
Fremgangsmåte
Som nevnt tidligere startet vi med å diskutere hvilket fagområde vi skulle basere oss på, og hva slags kunder produktet ville talt til. Da vi hadde bestemt oss og fikk klarert med foreleser at det dekket faglige krav, samlet vi oss for å diskutere hvordan designet skulle være. Vi ønsket å lage dronen spesiell og med unike trekk. Det gikk mye tid til søk på nettet etter andre droner med litt uvanlig design og research etter viktig og relevant informasjon for å bygge en drone. Ettersom vår bakgrunn med arduino besto av et relativt lavt kunnskapsnivå og tilnærmet null forståelse tok det i starten mye tid å tilvende seg språket. Underveis testet vi alltid hver eneste komponent og kartla rammeverket for vårt bruk. Dersom deler ikke opprettholdt ønsket standard eller manglet funksjoner, hadde vi en strukturert oversikt med mangler og forbedringspotensialet.
Da vi hadde bestemt oss for en drone med et isoporskall, gikk vi på isoporjakt. Etter å omsider ha skaffet isopor, startet vi med oppmåling, kutting, filing og spraymaling. Vi klarte til slutt å omforme isoporen til et skall vi var fornøyd med og som kunne brukes.
Kodene til en sammensatt drone kartla vi til å være tre hoveddeler:
– Kommunikasjon fra styringsenhet til dronen
– Måling av avstand til omgivelser med Ultra Sonic Sensor
– Gyrostabilisering
Vi delte de tre hoveddelene til hver av datastudentene som utgangspunkt, slik at vi hadde en ansvarlig for hver av delene. Maskinstudenten startet på sine gitte arbeidskrav, mens elektrostudenten tok ansvar for å finne ut og beregne motorstørrelse, batteristørrelse og hvilken type rotorblader som er best egnet til vårt produkt. Da vi kodet i Arduino merket vi raskt at det letteste var å samarbeide slik at vi fant småfeil i kodene på raskest måte. Derfor ble vi stort sett gjennom hele prosjektet alltid jobbende i grupper, og fikk raskt tilrettelagt og ordnet opp i kodefeil. Likevel, tar «prøve og feile» teknikken lang tid, og mangfoldige timer ble nedlagt i denne prosessen. En av de første problemene vi hadde var at funksjonen vi prøvde på ikke fungerte med Arduino Mega, men fungerer med Arduino Uno. Det har vært slike feil som har vært prosjektet største tidstyv.
Mot slutten av prosjektet og da andre eksamener var unnagjort for flesteparten av oss ble det en siste innspurt. Vi gikk nå inn i en intensiv uke på skolen fra morgen til kveld. Vi hadde ikke kommet så langt vi skulle ha ønsket, men så fremdeles at målet kunne nåes. Lange dager, mange uforståelige feil og slitsomme kvelder har gitt oss svar og solide resultat på flere av hoveddelene, men så ikke ut til å gi oss ett sluttprodukt vi så for oss i starten. De siste ukene var det virkelig viktig at vi klarte utnytte informasjon og kunnskapen vi hadde tilegnet oss fra starten for å få ferdigstilt produktet. Vi har under hele prosjektet vært flinke til å poste hyppig oppdateringer på prosjektet for å fortelle leserne hva vi har gjort og hva vi arbeider med.
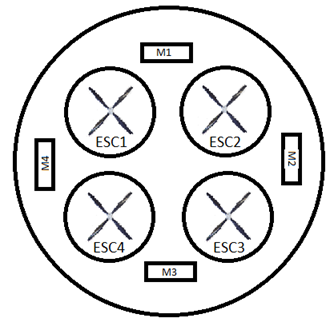
Dronen er oppbygd av fire motorer der hver av dem har sin egne Electronic Speed Controller (ESC). Det er ESCen som kommuniserer med motoren og holder orden på at motoren kjører på turtallet den har fått beskjed om. Alle motorene er originalt koblet til lik normalfart. Denne farten skal i utgangspunktet være styrt av en telefon som sender bluetooth signaler. Som vist på figur 1, inneholder dronen flere målere. Hver måler er kodet slik at dersom avstanden målt i centimetere er mindre enn en valgt varslingsavstand, vil de to nærliggende ESCene sende signaler til sin motor om at farten må økes for å styre unna hindringen. Dersom farten allerede er tilnærmet maks vil dronen gi beskjed om å senke turtallet på de to motorene på motsatte side. For eksempel, dronen kjører med en rolig fart når Ultra Sonic sensor M2 bemerker at måleren har gitt gjentatt varsler om en hindring. Da vil den sende melding til ESC2 og ESC3 at turtallet må økes for å trekke seg tilbake vekk fra hindringen. I motsetning, vil den i høy fart senke de to motstående motorenes turtall, altså ESC1 og ESC4.
Smart drone produksjon
Vi valgte å gå for laserkutting da vi skulle velge produksjonsmetode. Dette ble gjort fordi det er en kjapp og enkel måte å produsere noe på, og som gir oss resultatet raskt. Det at vi fort kan gå fra skisse til modell var noe som også bidro i avgjørelsen. Dessuten er det kun rammen som skal produseres med den valgte metoden, og ettersom at rammen har såpass simpel form vil laserkutting være mer enn nok. I tillegg er laserkutting en billig produksjonsmetode, sammenliknet med de andre metodene.
Når det kom til materialvalg hadde vi kun to krav. At det var sterkt nok, og hadde relativt lav vekt. Kryssfiner oppfyller begge disse krave. Selvsagt er det flere materialer som oppfyller begge disse kravene i enda større grad, men disse alternativene er vesentlig dyrere enn kryssfiner. Dessuten oppfyller kryssfiner kravene mer enn nok
Samarbeid
Ettersom at flesteparten av gruppens medlemmer hadde tidligere bekjentskap, visste vi i stor grad hva vi gikk til i dette prosjektet. Alle hadde også likt ambisjonsnivå noe som gjorde at hele prosjektet gikk enklere.
Vi etablerte fort hvilke dager vi skulle jobbe med prosjektet på, og satte opp en kumulativ timeplan. Gjennom hele prosjektet har vi klart å holde oss til denne planen, noe vi er veldig fornøyd med.
Det at medlemmene kommer fra forskjellige linjer er noe som har hjulpet oss enormt. Da en drone er et komplekst prosjekt som krever kunnskaper innenfor mange forskjellige disipliner har det ganget oss enormt at vi kommer fra forskjellige fagfelt.
Dersom det har oppstått uenigheter gjennom prosjekt har vi behandlet gruppen som et demokrati og hatt avstemning.
Konklusjon
Som nevnt tidligere, hadde vi forventninger om å få dronen til å fly, samt inneha de ønskede funksjonene. Gjennom prosjektet har vi innsett at dette er et relativt hårete mål. Prosjektet krevde mange flere timer enn hva vi først så for oss. Likevel, valgte vi å holde oss etter planen vi trodde inneholdt mer enn nok arbeidsdager, slik at det ikke gikk ut over de andre fagene som gir like mange studie poeng. Å implementere de ønskede funksjonene i dronen var vanskeligere enn forventet, og skapte mange tårefulle kvelder foran pc-skjermen. Gjennom prosjektet var det mange feil og misforståelser slik at koden ikke fungerte. Vi strevde med Electronic Speed Controller som mange ganger fikk oss til å se ut som spørsmålstegn. De var avhengige av å først få innsendt en lav verdi som tilsvarte at motorene skulle klargjøres, deretter sende en høy verdi som kunne starte rotorene. Vi har hatt ett par avstandsmålere som ikke fungerte, men likevel ikke har skapt store problemer da vi fort løste det med å bytte til en av de flere tilgjengelige sensorer vi hadde. For å potensielt kunne ha styrt dronen brukte vi ferdiglagde applikasjoner og en Bluetooth-mottaker vi koblet til arduinobrettet. Slik kunne vi enkelt lese av hvilke verdier vi sendte fra mobilen. En slik verdi var ikke problematisk å bruke til å styre en forhåndsinnstilt retning.
Ut fra våre forkunnskaper er samtlige av gruppens medlemmer fornøyde med det vi har prestert. Å bygge en drone var vanskeligere enn det noen av oss hadde forestilt oss, men føler vi har taklet oppgaven bra. Sluttproduktet ble ikke som ønsket, men vi har mestret prosjektets tre hoveddelene uten å ha fullført sammensetting.
Vi har hatt et enormt læringsutbytte av dette prosjektet. Det at vi har jobbet med medstudenter fra andre linjer og vist interesse i hverandres arbeid, har gjort at vi har fått lære mye nytt av hverandres fagfelt og gitt en bredere forståelse på sammenhenger mellom fagene. Gruppen føler at mye av det vi har lært er meget relevant med hensyn på arbeidslivet senere, i motsetning til for eksempel l’Hopitals regel.
Koder & film:
https://www.dropbox.com/s/cwktbptgslxycqw/Smart%20Drone.zip?dl=0
https://www.dropbox.com/s/34330ml1apjjmsv/25035209_1831786363498829_168588814_o.jpg?dl=0
{kind=link}
https://www.dropbox.com/s/1ve50v8u2vjdfjs/Motor___ultrasonic.ino?dl=0